
滑雪
记忆化搜索
记忆化搜索是对暴搜的一种优化,等价于动态规划。也就是说记忆化搜索是动态规划思想的一种实现方式,是通过搜索来实现的
优点
(1) 记忆化搜索可以避免搜到无用状态,特别是在有状态压缩时
(2) 不需要注意转移顺序(这里的“转移顺序”指正常 dp 中 for 循环的嵌套顺序以及循环变量是递增还是递减)
(3) 边界情况非常好处理,且能有效防止数组访问越界
(4) 有些 dp(如区间 dp) 用记忆化搜索写很简单但正常 dp 很难
(5) 记忆化搜索天生携带搜索天赋,可以使用技能“剪枝”!
缺点
(1) 致命伤:不能滚动数组!
(2) 有些优化比较难加
(3) 由于递归,有时效率较低但不至于 TLE(状压 dp 除外)
思路分析
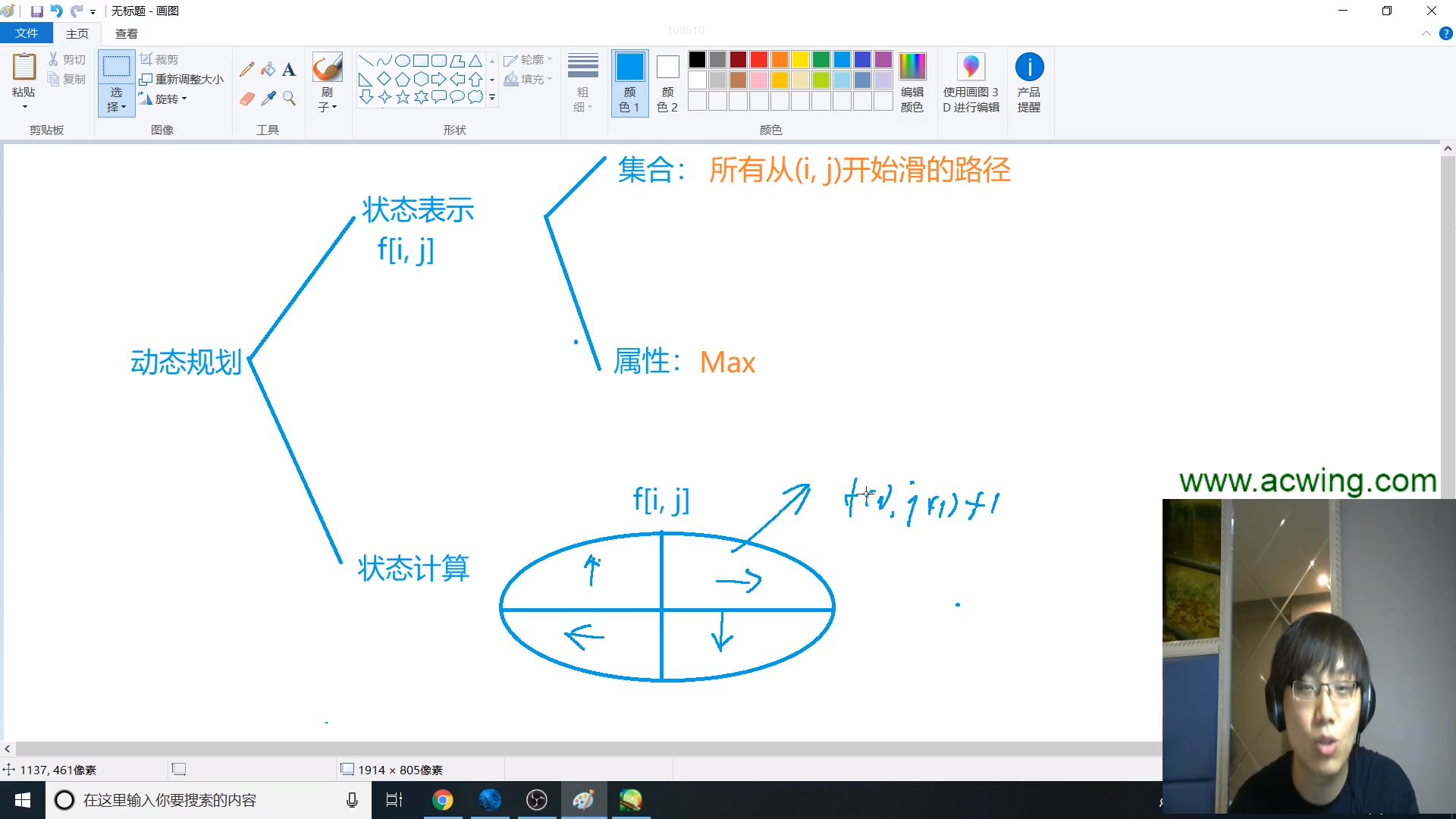
状态表示 f[i][j]
集合: 所有从(i, j)开始滑雪的路径
数量: max
状态计算
每一个位置都可能向四周下滑,选取可能的状态(当前点比下一个点要高),并且取最大值
可行性
递归算的时候不能进行死循环,需要是一个拓扑图,而这里面由于高度每次只能向低滑,所以不会出现死循环现象
代码
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 310;
int n, m;
int g[N][N]; // 建图
int f[N][N]; // dp数组
int dx[4] = {-1, 0, 1, 0}, dy[4] = {0, 1, 0, -1}; // 偏移量
int dp(int x, int y)
{
int &v = f[x][y]; // 引用
if (v != -1) return v; // 算过了就不再算了
v = 1; // 一个点的路径最少是1,因为包含自己
for (int i = 0; i < 4; i ++ )
{
int a = x + dx[i], b = y + dy[i];
if (a >= 1 && a <= n && b >= 1 && b <= m && g[x][y] > g[a][b]) // 合法的情况下向四周转移
v = max(v, dp(a, b) + 1); // 取max
}
return v;
}
int main()
{
scanf("%d%d", &n, &m);
for (int i = 1; i <= n; i ++ )
for (int j = 1; j <= m; j ++ )
scanf("%d", &g[i][j]);
memset(f, -1, sizeof f);
// -1表示该点还没有走过,初始化起到一个bool数组的作用,判断该点计算过没有
int res = 0;
for (int i = 1; i <= n; i ++ ) // 起点可能是每一个点,所以都要尝试
for (int j = 1; j <= m; j ++ )
res = max(res, dp(i, j));
printf("%d\n", res);
return 0;
}
