
分析
- 本题需要用到扫描线技巧。我们可以统计出所有矩形对应四个顶点的横坐标,过这些横坐标做x的垂线(即扫描线),如下图:
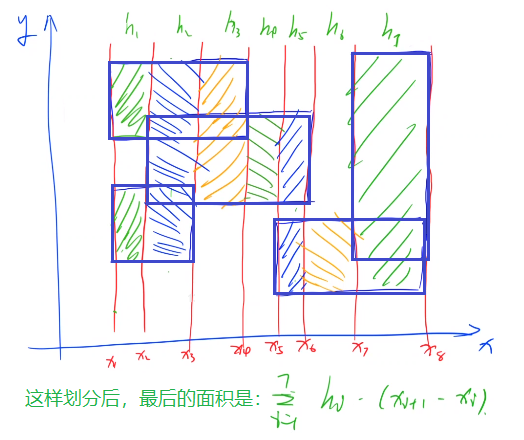
- 在沿着扫描线从左向右扫描的过程中,我们可以求解每个h的大小,我们可以这样操作:对于每个矩形与y轴平行的两个边,左边的权值记为+1,右边的权值记为-1(如下图):
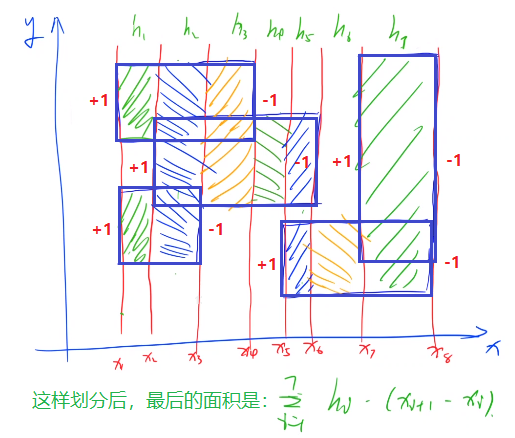
- 如果当前扫描线上是+1的话,将沿y轴方向的对应区间全部加上1,如果是-1的话,全部加上-1(区间上对应的数表示当前区间被多少个矩形覆盖);为了求出对应的h,我们需要统计出沿y轴的整个区间内大于0的区间长度总和;因此,总结一下,我们存在两个操作:
(1)对于某个区间加上一个数;
(2)统计出整个区间中大于0的区间的长度和;
- 上面的操作对应区间修改、区间查询,因此可以使用线段树来求解,线段树中每个节点存储的信息如下:
struct Node {
int l, r; // 区间左右端点,这里是纵坐标离散化后对应的值,是整数
int cnt; // 当前区间[l, r]全部都被覆盖的次数
// 不考虑祖先节点cnt的前提下,只考虑当前节点及子节点,cnt>0的区间总长度,类似于刚才(aAcwing 243)的sum
double len;
}
-
此时,本题的基本做法已经讲解完毕,但是我们维护cnt和len比较麻烦,所以我们考虑是否能根据此问题的性质进行优化,最终优化的结果是我们不需要进行
pushdown操作,分析如下: -
我们注意到本题中的线段树具有如下性质:
(1)因为我们求扫描线上总高度h,所以我们在查询的时候只会使用到根节点的信息;可以看到query的基本结构如下:
int query(int u, int l, int r) {
if (tr[u].l >= l && tr[u].r <= r) return tr[u].sum; // 对于本题,这句话一定会被执行,因此pushdwon执行不到
pushdown(u);
// ......
}
从上面的代码中我们发现,query中的pushdown永远不会被执行到。
(2)因为矩形存在两条边和y轴平行,因此线段树中所有的操作一定都是成对出现的(所谓成对出现,指的是我们对于某个区间加上一个1,则一定会在之后的操作中再将同样的一个区间减去一个1),且先加后减。可以看到modify的基本结构如下:
void modify(int u, int l, int r, LL d) {
if (tr[u].l >= l && tr[u].r <= r) {
tr[u].sum += (LL)(tr[u].r - tr[u].l + 1) * d;
tr[u].add += d;
} else {
pushdown(u); // 这句话是多余的
// ......
pushup(u);
}
}
核心:操作的区间是相同的,且先加1后减1。假设modify是给某个区间减1,则这之前这个区间一定都被加过1,对应线段树中的节点(是个集合,记为A)一定有该懒标记,减1的时候一定再会将A中所有的懒标记恢复到加1前的状态,因此,没必要把当前父节点的修改信息下传到子节点,也就是没必要使用pushdown操作。
- 这一题不用
pushdown是因为这个题目十分特殊,可以说这种做法就是针对这个题目的,因此可以单独记下来。
- 另外这一题中坐标都是小数,我们存储纵坐标的时候需要进行离散化,这里使用
vector对纵坐标进行离散化。因为图中有n个矩形,所以平行于y轴的边有$2n$条,因此我们需要存储$2n$个区间,每个区间(平行于y轴的线段)存储一个横坐标,两个纵坐标,并且需要按照横坐标从小到大的顺序排序,存储线段可以使用结构体,如下:
struct Segment
{
double x, y1, y2; // 区间的两个端点为(x, y1), (x, y2)
int k; // k只能取+1或者-1,表示当前区间的操作是+1还是-1
bool operator< (const Segment &t) const { // 让结构体可以从小到大排序
return x < t.x;
}
}
-
我们线段树中维护的内容是一个个的区间,一共$2n$个,因此线段树大小要开到$8n$的大小。
-
这些区间的纵坐标需要放到ys(是一个vector)中,进行离散化(保序离散化,因为我们要判断区间的包含关系),离散化过程:排序,去重;然后通过
lower_bound可以找到每个y在vector中的下标;ys[0]表示最小的一个纵坐标值。 -
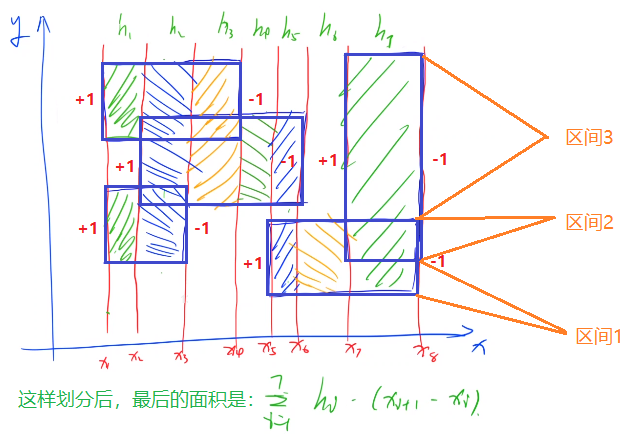
线段树中需要维护$2n$个区间,因此线段树中的每个节点代表一个区间,假设某个区间是是$(y_i, y_{i+1})$,且$y_i$和$y_{i+1}$之间没有其他的y了,则该区间对应于线段树中的叶节点,则如果$ys[l1]=y_i, ys[r1]=y_{i+1}$,对应的线段树的区间是$[l1, r1]$,另外注意这里的$(y_i, y_{i+1})$可能不是矩形的某条边,如上图中扫描线$x_8$对应的情况。这里的$x_8$对应线段树中的三个区间(只单纯的考虑后面两个矩形的情况下是3个,否则不是)
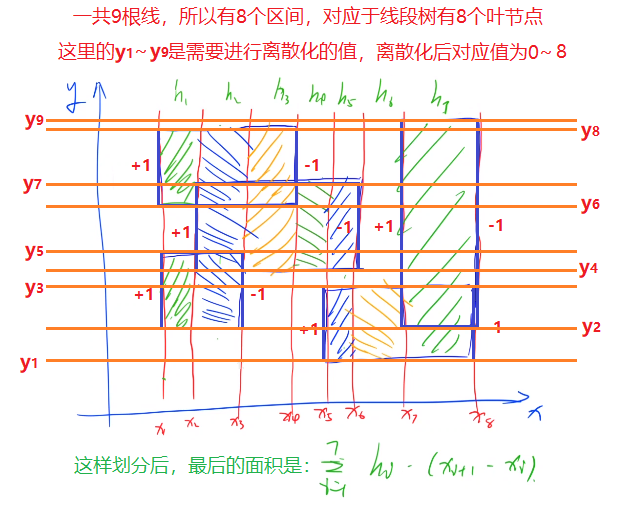
- 具体来说,上图中存在的最小区间个数为8个,因此线段树中的叶节点也是8个:
-
因此线段树中的某个”点”对应于图中是某段区间,比如根节点对应于上图中的区间$[y_1, y_8]$。
-
线段树中u这个节点表示的是$[tr[u].l, tr[u].l + 1]$,$tr[u].l + 1, tr[u].l + 2]$, ......, $[tr[u].r, tr[u].r + 1]$这些小区间,这里的$tr[u].l,tr[u].r$都是对应y离散化后的值。
-
如上图,这些小区间分别是$[y_1, y_2]、[y_2, y_3]、…、[y_8, y_9]$,他们的长度组成一个数组a,其中a[0]表示第一个区间的长度,对应离散化区间为[0,1],原区间为[ys[0], ys[0+1]]=$[y_1, y_2]$。
-
a[0~2]表示第一个区间的长度,对应离散化区间为[0,1]、[1, 2]、[2, 3],原区间为[ys[0], ys[2+1]]=$[y_1, y_4]$。
-
那么我们的线段树相当于对数组a进行区间修改、区间查询,例如:
-
当我们要更新$[y_4, y_7]$这一段区间,相当于更新a[3~5],对应于$a[find(y_4) - (find(y_7)) - 1]$(find函数返回离散化后的值)。
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
const int N = 100010;
int n; // 矩形个数
struct Segment {
double x, y1, y2; // 区间的两个端点为(x, y1), (x, y2)
int k; // k只能取+1或者-1,表示当前区间的操作是+1还是-1
bool operator< (const Segment &t) const {
return x < t.x;
}
} seg[N * 2]; // 存储区间
struct Node {
int l, r; // 纵坐标对应的离散化的值
int cnt; // 当前区间[l, r]全部都被覆盖的次数
// 不考虑祖先节点cnt的前提下,只考虑当前节点及子节点,cnt>0的区间总长度
// 类似于刚才(aAcwing 243)的sum
double len;
} tr[N * 8];
vector<double> ys; // 用于离散化纵坐标
int find(double y) {
return lower_bound(ys.begin(), ys.end(), y) - ys.begin();
}
void pushup(int u) {
if (tr[u].cnt) { // 说明节点u对应的区间完全被覆盖
// 例如tr[u].l = 3, tr[u].r = 5, 对应上面分析的于a[3],a[4],a[5]三个区间
// 对应离散化区间为[3, 4], [4, 5], [5, 6]
// 对应上面的[ys[3], ys[4]], [ys[4], ys[5]], [ys[5], ys[6]]
// 即[y4, y5], [y5, y6], [y6, y7]
tr[u].len = ys[tr[u].r + 1] - ys[tr[u].l];
} else if (tr[u].l != tr[u].r) { // 没有完全被覆盖,且有子区间
tr[u].len = tr[u << 1].len + tr[u << 1 | 1].len;
} else { // 没有完全覆盖,且是叶节点
tr[u].len = 0;
}
}
void build(int u, int l, int r) {
tr[u] = {l, r, 0, 0};
if (l != r) {
int mid = l + r >> 1;
build(u << 1, l, mid), build(u << 1 | 1, mid + 1, r);
}
}
// 从节点u开始将区间[l, r]加上k
void modify(int u, int l, int r, int k) {
if (tr[u].l >= l && tr[u].r <= r) {
tr[u].cnt += k;
pushup(u);
} else {
int mid = tr[u].l + tr[u].r >> 1;
if (l <= mid) modify(u << 1, l, r , k);
if (r > mid) modify(u << 1 | 1, l, r, k);
pushup(u);
}
}
int main() {
int T = 1;
while (scanf("%d", &n), n) {
ys.clear();
for (int i = 0, j = 0; i < n; i++) {
double x1, y1, x2, y2;
scanf("%lf%lf%lf%lf", &x1, &y1, &x2, &y2);
seg[j++] = {x1, y1, y2, 1};
seg[j++] = {x2, y1, y2, -1};
ys.push_back(y1), ys.push_back(y2);
}
// 对纵坐标进行离散化
sort(ys.begin(), ys.end());
ys.erase(unique(ys.begin(), ys.end()), ys.end());
// ys.size()个纵坐标,ys.size()-1个区间,下标是0~ys.size() - 2
build(1, 0, ys.size() - 2);
// 按照横坐标排序(横坐标当成扫描线)
sort(seg, seg + n * 2);
double res = 0;
for (int i = 0; i < 2 * n; i++) {
if (i > 0) res += tr[1].len * (seg[i].x - seg[i - 1].x);
modify(1, find(seg[i].y1), find(seg[i].y2) - 1, seg[i].k);
}
printf("Test case #%d\n", T ++ );
printf("Total explored area: %.2lf\n\n", res);
}
return 0;
}
