
本解法比较适合小白 (图解+详细分析+朴素解法)
算法思路:贪心、转化
1、题目给了我们很多个点,以及单个雷达扫描的范围,想让我们求一下在 $x$ 轴上至少需要多少个雷达能把所有个点全部覆盖住
2、其实很多问题都和这题思维方式很相似,如果我们直接去考虑一个问题发现不那么容易考虑的时候,我们可以想办法把它做一个转化,转化成我们容易考虑的形式
3、就这个题目而言,我们如果直接去考虑的话,是需要处理很多的圆,因为雷达扫描是以圆为范围进行覆盖的,所以我们需要考虑要多数个圆才能把所有的点覆盖住
4、可是圆的特殊性导致我们无法很好的用一个规律去总结出最优解,我也尝试过正面去做,发现确实很难,所以我们需要转化
5、如何转化呢?我们一开始是以雷达的角度去思考这个问题,但是我们完全可以换一个思考对象,那就是对于点来分析
6、既然是对于点来分析,那么该如何操作呢?
7、我们可以这么考虑,雷达扫描的范围,也就是半径是已知的,并且雷达也就是圆心一定在 $x$ 轴上,所以我们可以根据这个信息,对于每个点来说,都能计算出能够覆盖该点的,雷达位置的取值范围,也就是圆心的取值范围
8、怎么计算呢?我们假设能覆盖到该点的雷达的坐标为 ($x$,0),而该点的坐标为 ($x_1$,$y_1$),那么我们就可以得到,能够覆盖该点的 $x$ 的取值范围(计算边界即可),下面进行公式的推导
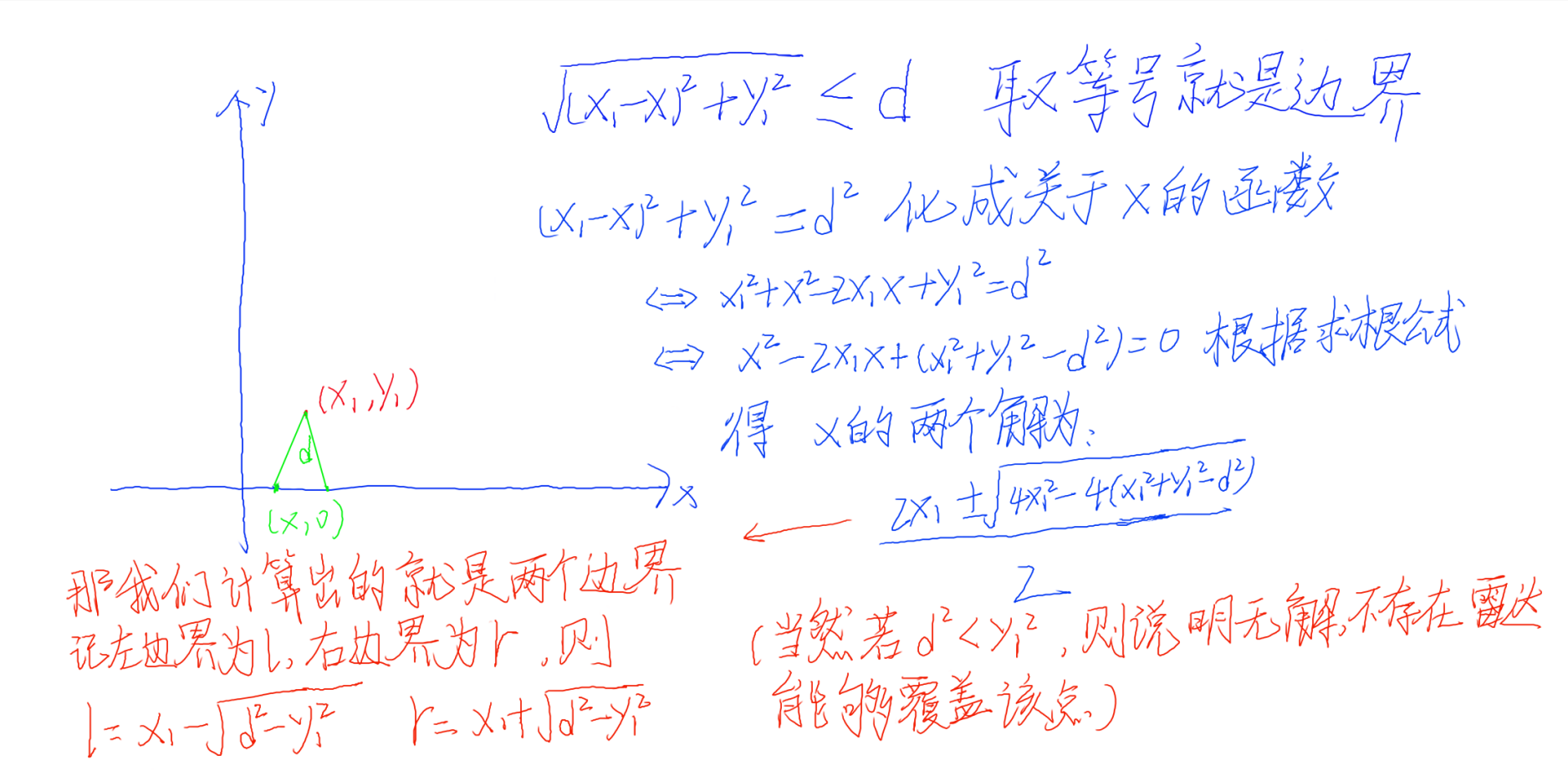
9、那么根据上图我们就求出了 每个点,对应的,能够扫描到它的,雷达的范围,即求出来的 $l$ 到 $r$ ,就是在 $x$ 轴上的可以扫描到该点的范围
10、那么我们对于每个点都可以求出,在 $x$ 轴上的一个范围,使得在这个范围内的雷达都能够扫描到该点
11、我们计算出了这个有什么用呢?
12、通过计算这个区间我们就把原来的 “由雷达去扫描点” 的问题转化成了 “用点来确定雷达位置” 的问题
13、那么我们计算出的区间有什么用呢?
14、我们随机拿出两个点,它们都有对应的区间,那么它们的区间关系无非以下两种情况
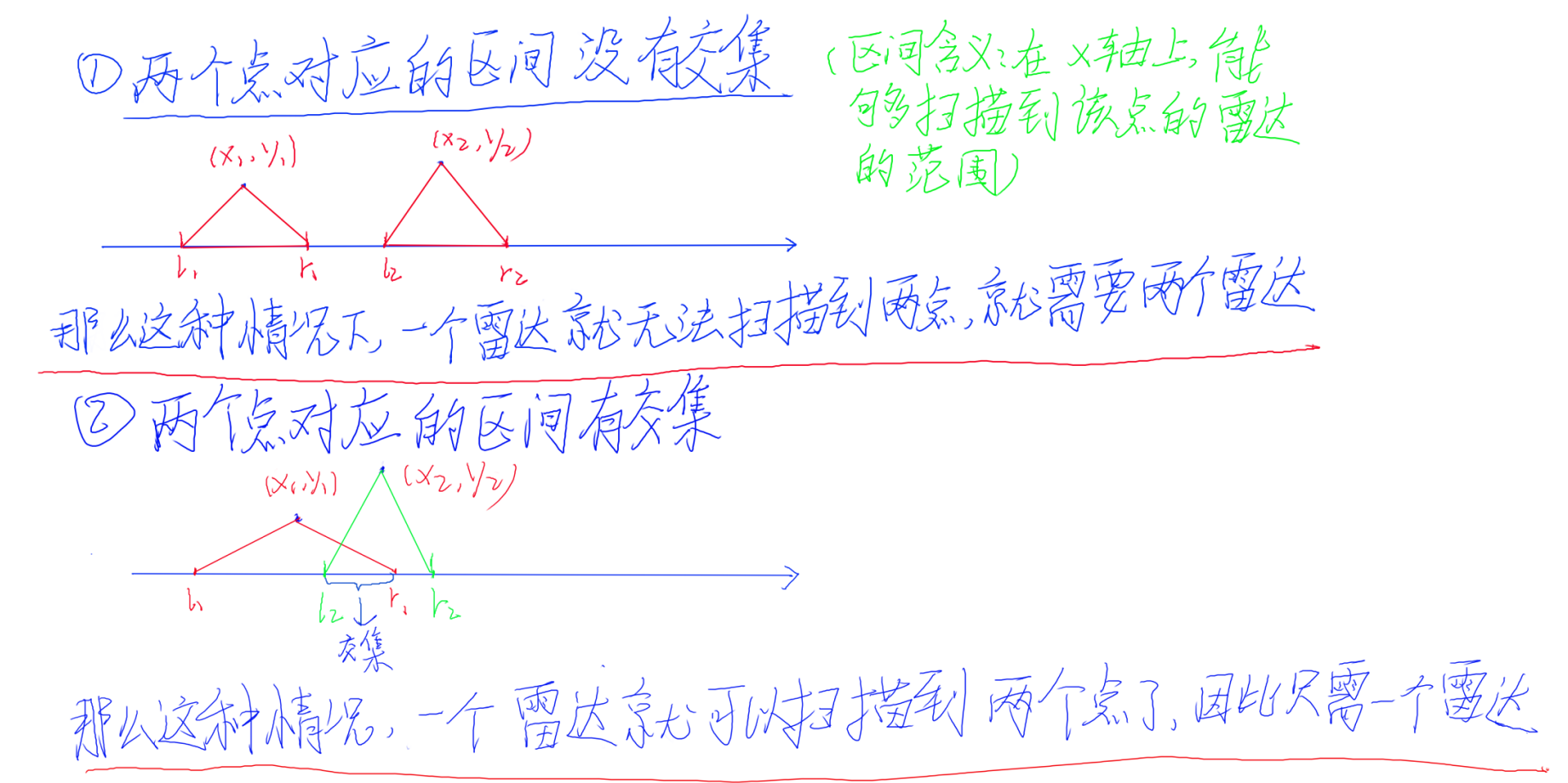
15、通过图中的分析可以知道,任意两个点的区间关系无非两种,要么存在交集,要么不存在交集。其中,如果两个点存在交集,那么这两个点只需要一个雷达既可以覆盖;如果不存在交集,那么则需要两个雷达进行覆盖
16、那么加上这个信息,我们就可以知道,要计算至少要多少个雷达能够覆盖所有的点,也就是考虑一下每个点对应的区间的关系就可以了,只要把区间的关系搞清楚了,那么需要多少个雷达也就解决了。
17、既然我们要弄清楚各个点对应的区间的关系的话,那我们就需要弄清楚任意两个点之间的区间关系。
18、如果我们对于某个点都去遍历一边其他点的话,未免过于复杂,所以我们需要优化
19、不难想到,既然我们要求区间之间的关系,而且这种关系是和顺序没有关系的,所以我们可以考虑把区间排序。这其实也是一种思想,把无序的转化成有序的往往更容易操作
20、那么这里又有一个问题了,那我们是以区间的左端点作为区间的排序依据(即按左端点大小来排序),还是以右端点来排序呢(即按右端点的大小来排序)?
21、这边我先告诉大家结论,晚点会证明为什么需要这样。结论就是我们需要按照区间的右端点进行排序(稍后会解释)
22、那我们对于好序后的区间应该如何操作呢?假设我们现在有 $n$ 个点,那么对应的就会有 $n$ 个区间,那么我们如何求呢?
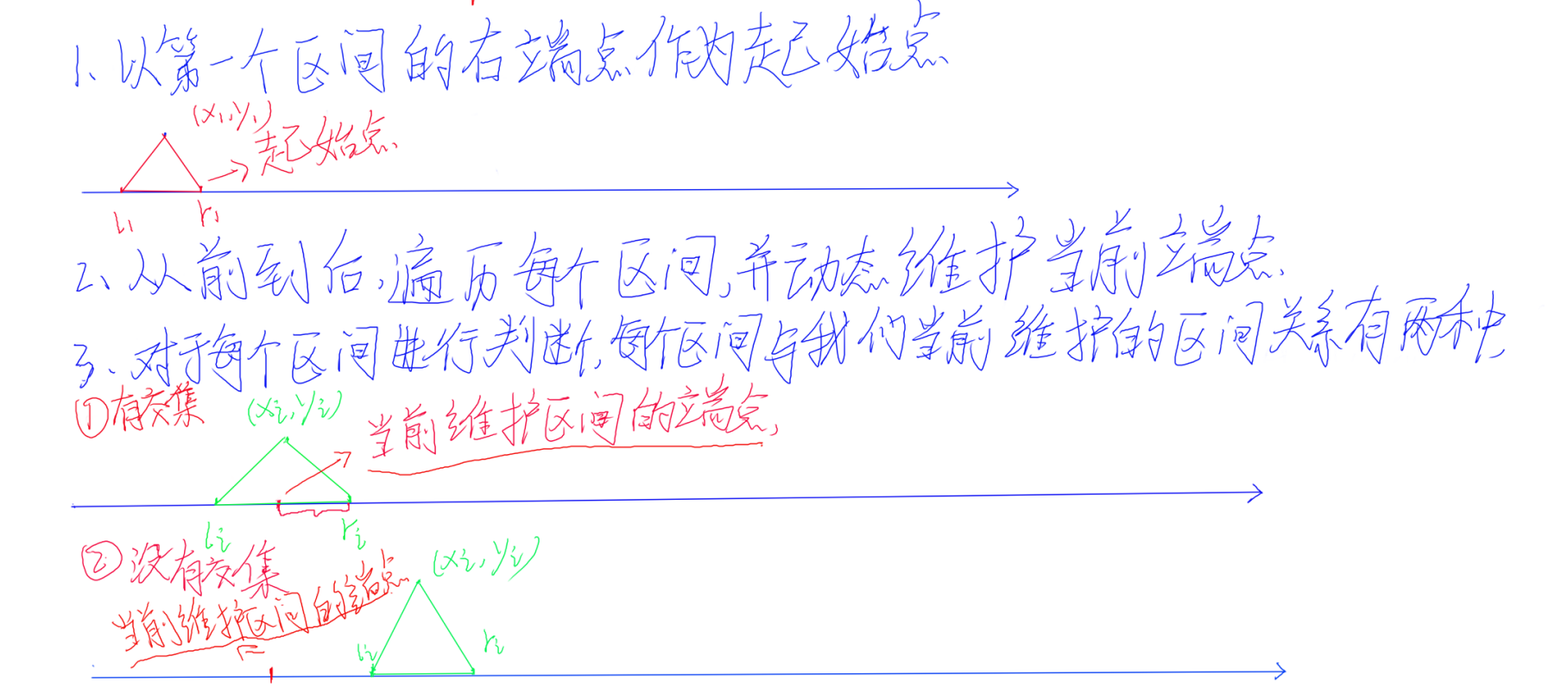
23、从上图可以看到,我们以第一个区间的右端点为起点,从前往后遍历所有的区间,里面谈到了一个动态维护区间的概念,那么我们应该如何具体实现呢?
(先解释一下,我们当前维护的区间的本质是当前雷达能够安装的范围)
24、如果是上图的情况,我们当前维护的区间,与遍历到的区间有交集的话,那么说明我们当前的雷达能够覆盖该点(因为在我们当前雷达能够安装的范围内能够扫描到该点),那么我们就跳过这个点(因为不需要多增添雷达),再遍历后面的点
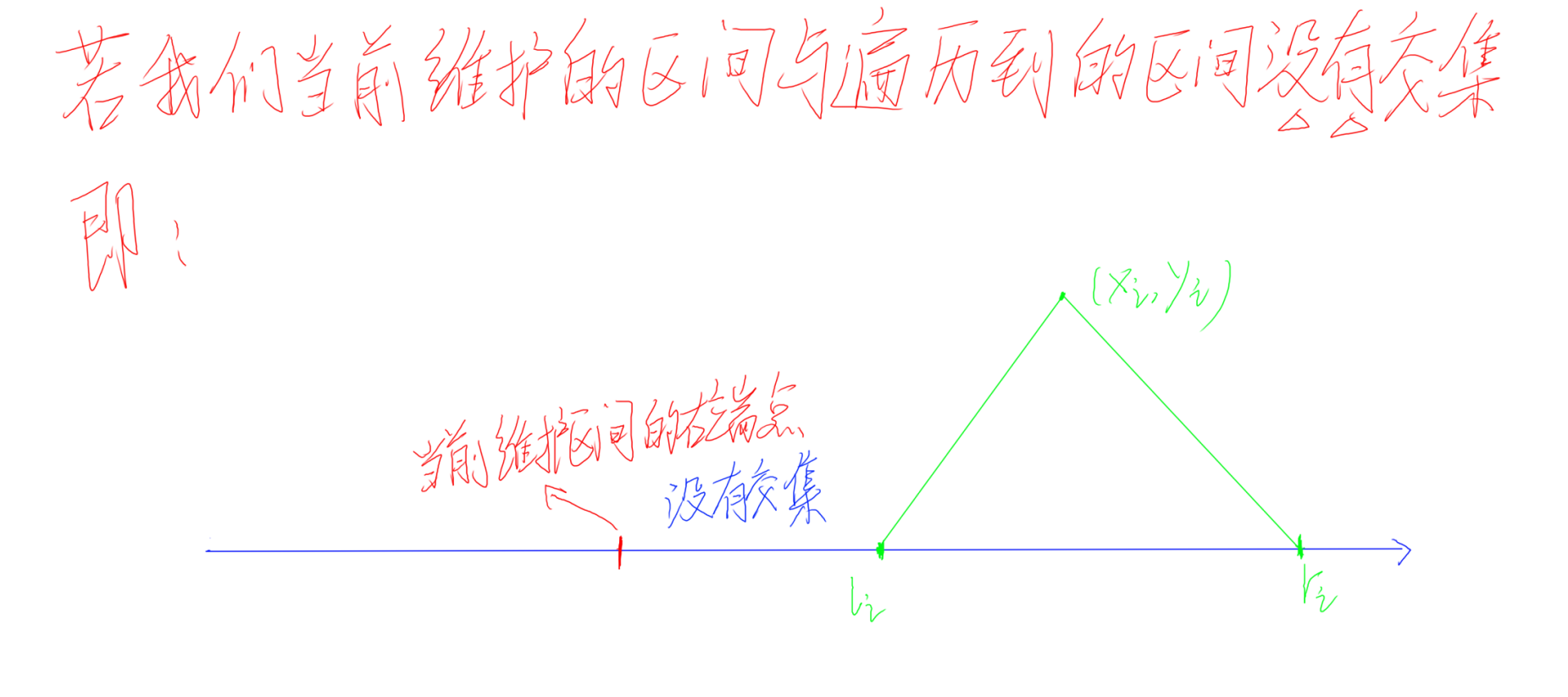
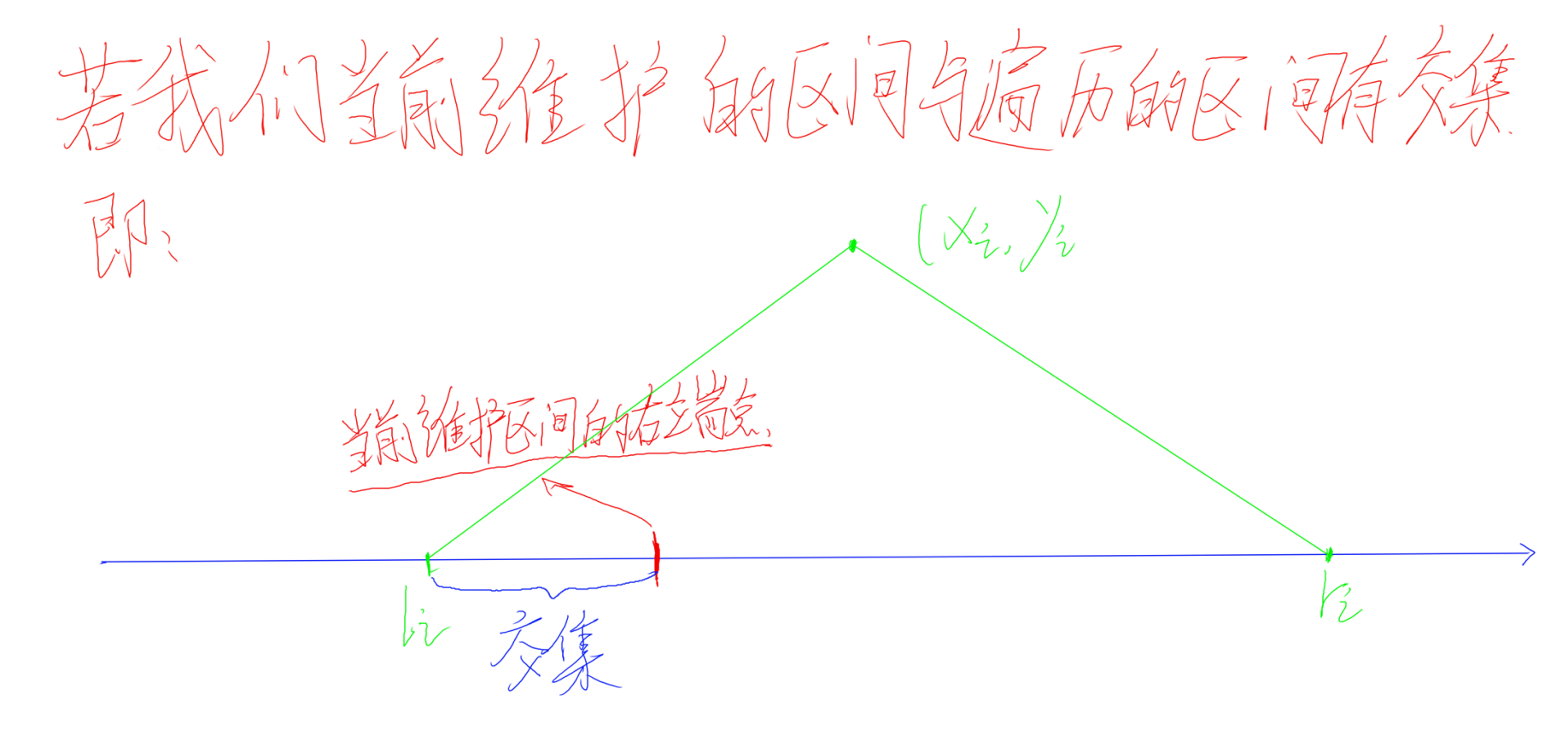
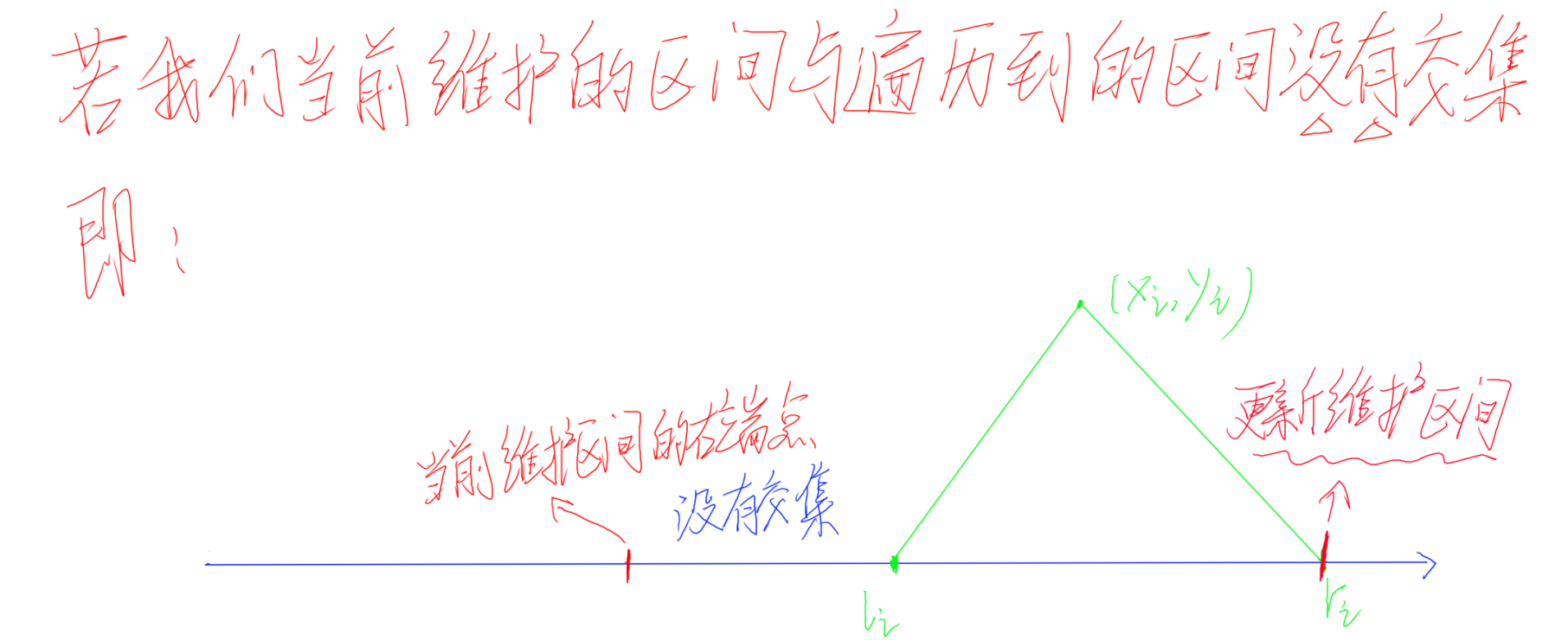
25、如果是上图的情况,我们当前维护的区间,与遍历到的区间没有交集的话,那么说明我们当前的雷达无法覆盖该点(因为在我们当前雷达能够安装的范围无法扫描到该点),所以我们就要增加一个雷达,用来扫描该点。而与此同时,我们就要把我们当前维护的区间的右端点,修改为这个遍历到的区间的右端点(为什么要修改呢?因为我们增添了一个新的雷达,那么我们雷达能够安装的范围就变了,所以我们要更新一下我们维护的区间)
26、用上述方法,把排好序后的区间,从 1 到 $n$ 依次按照上述操作遍历,就可以求出我们所需要的雷达数量
27、最后我们来解释一下前面提到的,为什么要把各个区间以右端点为标准进行排序?请看下面这张图
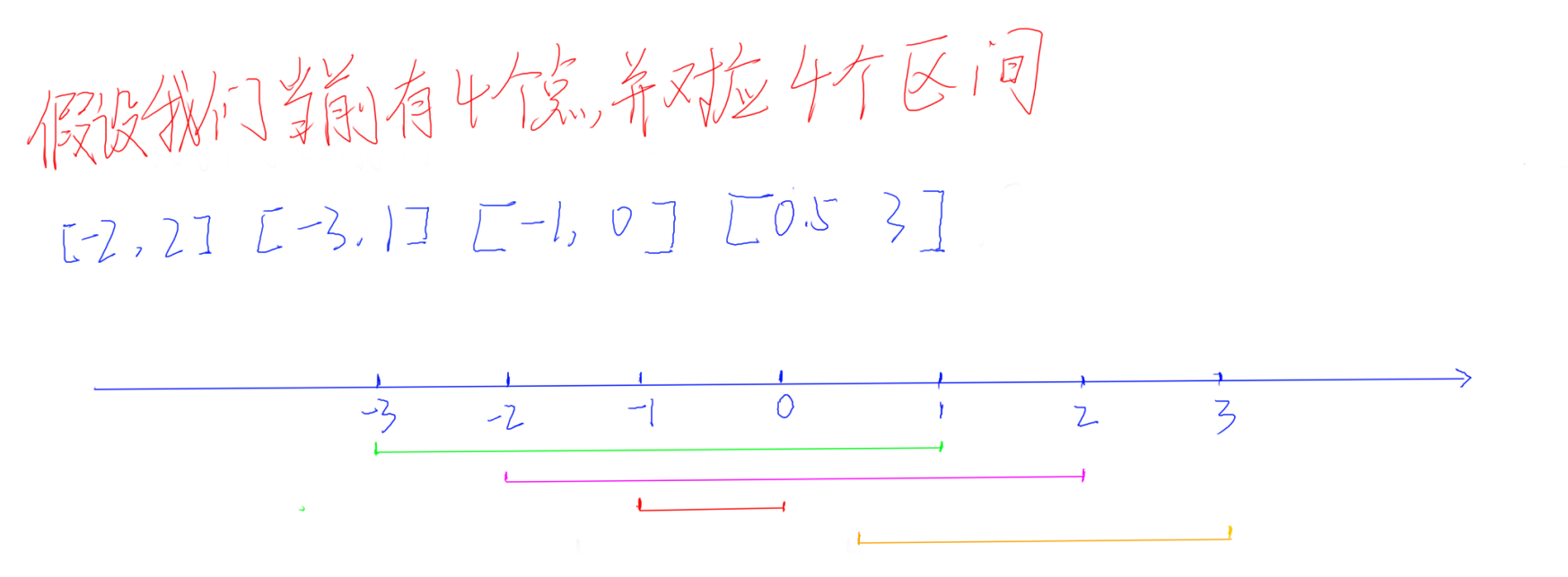
28、上图中表示了 4 个点以及其对应的区间,现在我们以左端点为排序标准,我们用我们上述的方法进行判断,我们以第一个区间(也就是区间[-3,1])的右端点为当前维护区间的端点,往后遍历。会发现,后面的每一个区间的左端点都小于我们的当前维护区间的端点,根据上述方法,那么我们只需要一个雷达就可以覆盖这 4 个点。
29、但事实并非如此。现在我们以右端点为排序标准,我们再用上述方法进行判断,那我们的第一个区间就变成了 [-1,0],那么我们当前维护区间的右端点就是 0 ,然后往后遍历。可以发现,当遍历到最后一个区间 [0.5,3]的时候,这个区间的左端点就大于我们当前维护的区间的端点 0(前面的两个区间的左端点都是小于 0 的 ) ,那么根据我们上述的方法,我们就需要多加一个雷达,所以此时我们需要两个雷达才可以覆盖所有的点。
30、所以,如果以左端点为排序标准,很可能会出现错误,正解应该是以右端点为排序标准。
31、写这篇题解时间跨度有点长,花了我三天的时间,因为平时也比较忙。所以这篇题解可能有些地方讲的不是很清楚的,不懂的同学可以在评论区告诉我,我再来更正!
#include<iostream>
#include<cstring>
#include<algorithm>
#include<cstdio>
#include<cmath>
//动态的维护雷达所能扫描到的范围
#define l first// l 表示左边界
#define r second// r 表示右边界
using namespace std;
typedef long long LL;
const int N=1010;
int n;
typedef pair<double,double>PII;
PII a[N];//LL
PII c[N];//LL
LL d;
bool cmp(PII A,PII B)//比较函数,让pair<double,double>类型的数组以后面的大小为依据来排序
{
return A.r<B.r;
}
int main()
{
scanf("%d%lld",&n,&d);
for(int i=1;i<=n;i++)scanf("%lf%lf",&a[i].l,&a[i].r);//读入每个点
bool flag=true;//用于判断是否有点无法覆盖到
for(int i=1;i<=n;i++)//计算出我们每个点对应的雷达 可以安放的范围 也就是把我们的点转化成了范围
{
if(4*a[i].l*a[i].l+4*(d*d-a[i].l*a[i].l-a[i].r*a[i].r)>=0)//判断是否有解
{
c[i].l=a[i].l-(sqrt(4*a[i].l*a[i].l+4*(d*d-a[i].l*a[i].l-a[i].r*a[i].r)))/2;//数学公式推导出来的,左端点
c[i].r=a[i].l+(sqrt(4*a[i].l*a[i].l+4*(d*d-a[i].l*a[i].l-a[i].r*a[i].r)))/2;//右端点
}
else//如果误解说明覆盖不到,那就false,直接退出
{
flag=false;
break;
}
}
sort(c+1,c+n+1,cmp);//这边要根据区间的右端点进行排序,如果不按照这个规则进行排序会出错
double weizhi=c[1].r;//把第一个点的右端点记为起始位置,然后动态的维护一下我们当前雷达所能扫描的范围
int ans=1;//答案初始化为 1 ,因为我们一开始就放了一个雷达用于满足第一个点(因为我们把第一个点的右端点作为了起始位置)
for(int i=1;i<=n;i++)
{
if(c[i].l>weizhi)
//如果我们当前的点 所需要的雷达的区间的左端点大于我们目前的位置,那么说明我们此时雷达的覆盖范围不够了,所以要新增一个雷达
{
ans++;
weizhi=c[i].r;//更新一下我们雷达所能扫描的范围
}
}
if(flag)//如果我们所有的点都能被覆盖到,就输出结果
printf("%d",ans);
else//如果存在点不能被覆盖到,那就输出 -1
printf("-1");
return 0;
}

这道题按l排序跟按r排序不应该没有区别吗?为什么按l排序就错
按左端点排序也没问题,我就左端点,accept了
左端点排序的时候需要去更新最短的右端点
以左端点排序也是可以的,博主可以参考一下这个用左端点排序
https://www.acwing.com/solution/content/10615/
对滴,我觉得左端点容易出错,所以就写了右端点