
查找与查找表
“查找”指的是在数据集合中选出某些符合特定条件的元素,这个用于查找的数据集合叫做“查找表”,可以分为静态查找表和动态查找表,前者只关心查找,后者还要关心元素的增删。之前遇到过的顺序查找和折半(二分)查找,都是基于静态查找表的算法。动态查找表除了此前的顺序表,链表,字典树以外,还有二叉查找树,B树,B+树,散列表等多种自带查找算法的查找表。前面那些各种各样的“树”以后再说,这次的主角是最后提到的“散列表”。
哈希表
哈希表是散列表的另一个名字,来源于英语单词“散列”(hash)的音译,表中元素的一个很重要的特性是其存储地址与其值高度关联,这种关联性要通过一个“哈希函数”来实现,即Addr=H(key)
哈希表自身需要借助数组实现,哈希函数的值和数组的下标一一对应,当哈希表满了之后需要自动扩容。另外,不同数据元素的哈希函数值可能相同,这属于“冲突”现象,而哈希表也需要有冲突处理机制。下面将结合代码一同介绍哈希表存储结构,哈希函数,插入,查询和扩容
哈希表类定义
STL中在关联式容器map,multimap,set,multiset前面加上unordered_就成为哈希容器,代码中以unordered_set为例,先给出哈希表类定义:
template<class Elem>
class UnorderedSet {
private:
vector<Elem> base;//存储元素用的数组
size_t size = 0;//容器大小,即存入元素的个数
const size_t primeList[13] = {
53, 97, 193, 389, 769, 1543,
3079, 6151, 12289, 24593,
49157, 98317, 196613
};//可供选择的表长,idx与此对应
size_t idx = 0;
//哈希函数
size_t hashCode(Elem e);
//扩容时重新计算哈希值
void rehash();
public:
//构造函数
UnorderedSet();
//插入
void insert(Elem e);
//查找
bool find(Elem e);
};
哈希函数
哈希表是通用型的查找表,对元素类型无特殊要求,这里以整数型(int)为例。常见的哈希函数有以下几种:
1. 直接定址法:H(key)=a∗key+b。对于均匀连续分布的元素,这种方式有奇效,但元素的离散程度如果稍微高一点,那就会造成存储空间的严重浪费。如班级内学生的学号,假设为170601∼170648,那么就可以取H(key)=1∗key−170601,把所有元素集中在下标0∼47之间的数组中
2. 除留余数法:H(key)=key MOD p,其中p一般取不大于表长的质数,这样可以一定程度上减少冲突。这是最常用的哈希函数,STL中给出了一些可选的质数,这里选取了其中靠前的13个作为类内的primeList,供初始化和扩容时选择表长,哈希函数也是用元素本身与表长取模
template<class Elem>
UnorderedSet<Elem>::UnorderedSet()
{
//选择第一个质数53作为初始表长
base.resize(primeList[idx], Elem(INT_MIN));
}
template<class Elem>
size_t UnorderedSet<Elem>::hashCode(Elem e)
{
//size_t是unsigned long long类型,有无符号不影响整数的存储
return (size_t)e % primeList[idx];
}
————————————
3. 数字分析法:选取数字分布较为均匀的几位为关键字,适用于已知的关键字集合,比如11位的手机号码,选取最后4位为关键字
4. 平方取中法:在元素的平方构成的数位中选取中间的几位为关键字
冲突处理
在介绍冲突前,首先介绍“同义词”概念:不同的表项求得的哈希函数值对应到了同一个地址,那么这些表项都是该地址的“同义词”。某表项在存入哈希表前发现它所在地址已经存在了同义词,这就是所谓的“冲突”现象。处理冲突的思想主要有三种:
1. 开放定址法:表中空闲地址同时对该地址的同义词和非同义词开放,也就是把产生冲突的表项存入表中另一个槽位中,而不另外申请空间,又称“闭散列”
2. 链地址法:在表外申请新的空间,存放某地址的所有同义词,并将这些表项按照链表或树的方式关联起来,又称“开散列”
3. 再散列法:准备多个哈希函数,当某个哈希函数冲突时,换另一个哈希函数重算地址,直到不冲突为止
本帖中先介绍考研热点“开放定址法”,链地址法过后填坑(哈希函数都为除留余数法)。再散列法由于实现较为麻烦,还需进一步查阅资料,暂时不补
插入
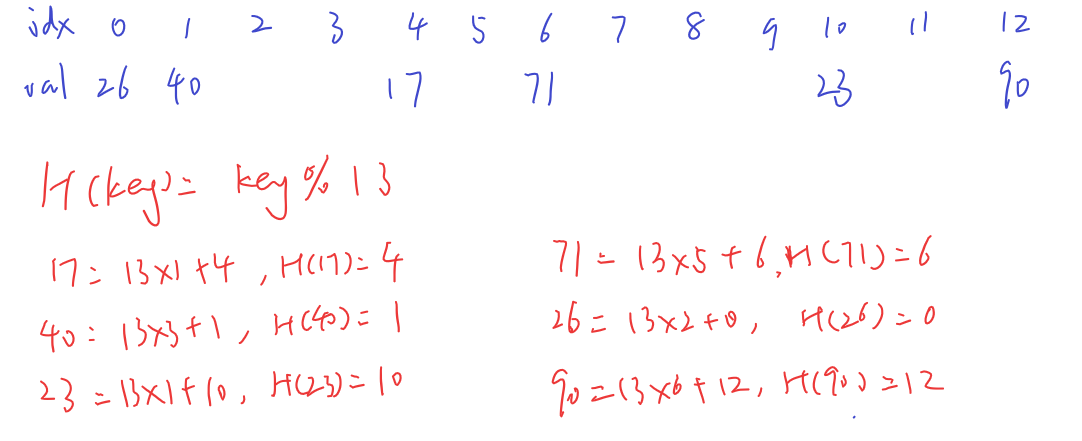
下面的示例中,表长取了一个更小的质数13,依次将{17,40,23,71,26,90}插入哈希表,挨个计算哈希函数值,得到以下的元素位置:
如果还想继续往里插入{19,6,32},由于它们的哈希值都是6,而地址6上已经有了元素71,此时就发生了冲突。对于开放定址法,冲突的处理主要就是在原来的值上添加一个增量di之后重算哈希函数值,统一格式为Hi=(H(key)+di) MOD p。根据增量序列的不同,又分为3种方法:
1. 线性探测:di=1,2,3,4,…,p−1
2. 二次探测:di=+12,−12,+22,−22,…,+k2,−k2(k<m/2)
3. 伪随机数探测:di从伪随机序列中取得
下面给出线性探测(代码中的方法,红色表示)和二次探测(绿色表示)处理冲突之后,上述三个元素的位置:
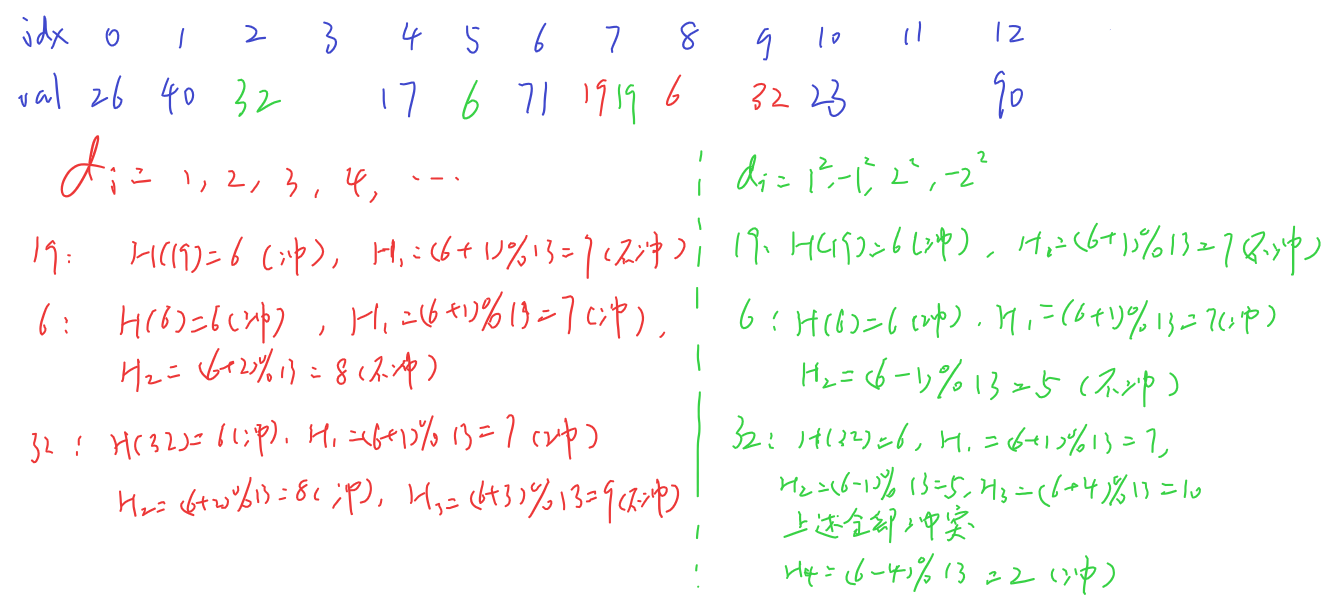
实际上,线性探测方法对于同义词较多的情况,会出现很明显的聚集现象,二次探测和伪随机数探测就可以有效减少聚集(示例过后填坑)
扩容
哈希表有一个装填因子概念,定义为表内元素的数量与表长的比值,当表长确定时,表内元素数量也就有了一个阈值,超过这个阈值,哈希表就会自动扩容,STL中默认的装填因子为1.0,也就是当哈希表满了的时候才扩容。扩容总共分为三个步骤:
1. 确定哈希表的新长度(这里是在质数列表中选择下一个更大的),构造一条更长的数组
2. 重新计算原表中每个元素的哈希值
3. 将它们依次移动到新的数组中,并替换原来的数组
扩容函数如下:
template<class Elem>
void UnorderedSet<Elem>::rehash()
{
idx++;//准备选择下一个质数
vector<Elem> newBase(primeList[idx], Elem(INT_MIN));
//重算每个元素的哈希值(除留余数+线性探测)
for (auto& e : base) {
size_t pos = hashCode(e);
while (newBase[pos] != Elem(INT_MIN)) {
pos = hashCode(Elem(pos + 1));
}
//放进新表中
newBase[pos] = e;
}
//替换原表
base = newBase;
}
加上扩容之后的插入函数:
template<class Elem>
void UnorderedSet<Elem>::insert(Elem e)
{
//已经在表中,不用插入
if (find(e)) {
return;
}
//装满了,扩容
if (size == primeList[idx]) {
rehash();
}
//计算哈希值(除留余数+线性探测)
size_t pos = hashCode(e);
while (base[pos] != Elem(INT_MIN)) {
pos = hashCode(Elem(pos + 1));
}
base[pos] = e;
size++;
}
查找
查找元素,首先计算待查元素的哈希值,然后保持和插入时相同的冲突处理策略,依次重算哈希值(插入时使用除留余数+线性探测,那么查找时也用除留余数+线性探测)并查看该地址上的元素是否为待查元素,是则查找成功,查找到空槽位或者遍历全表仍未查找到,则查找失败
查找函数如下:
template<class Elem>
bool UnorderedSet<Elem>::find(Elem e)
{
size_t pos = hashCode(e);
for (int i = 0; i < primeList[idx]; i++) {
//当前地址上是待查元素,直接成功
if (base[pos] == e) {
return true;
}
//空槽位,直接失败
if (base[pos] == Elem(INT_MIN)) {
return false;
}
//和插入时使用相同的冲突处理策略
pos = hashCode(Elem(pos + 1));
}
//遍历完了仍未成功,自动失败
return false;
}
