
$\Huge\color{orchid}{点击此处获取更多干货}$
SPFA
Bellman-Ford算法复杂度过高,究其原因主要是涉及了很多无效操作,如下图所示:
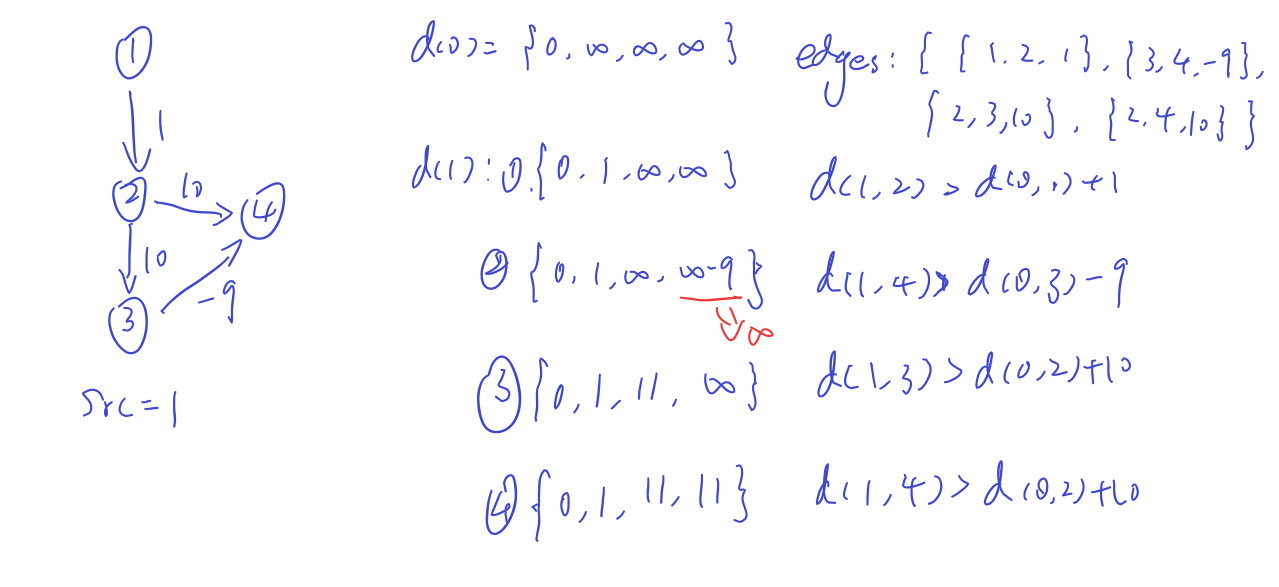
第一轮迭代中,有效的边只有$\left \{ 1,2,1 \right \} $,剩余的都是无效操作,特别是对边$\left \{ 3,4,-9 \right \} $,无穷减去9仍然趋于无穷。只有在节点2的最短距离确定之后的第二轮迭代中,$\left \{ 2,3,10 \right \}$和$\left \{ 2,4,10 \right \}$才会有用。最短距离未被更新过的节点,对其后继节点更新最短距离是无效操作,在SPFA算法中,避免这样的无效操作成为了核心。
与上述核心思想对应的,每次更新时,只会对有效节点的后继节点执行松弛操作,因此可以像BFS那样,用队列保存有效节点。除此之外还有一层去重,那就是因为在SPFA算法中,同一个节点不会被反复更新,因此还要留意每个节点是否已经在队列中。松弛操作成功执行,并且不在队列中的节点才需要加入队列
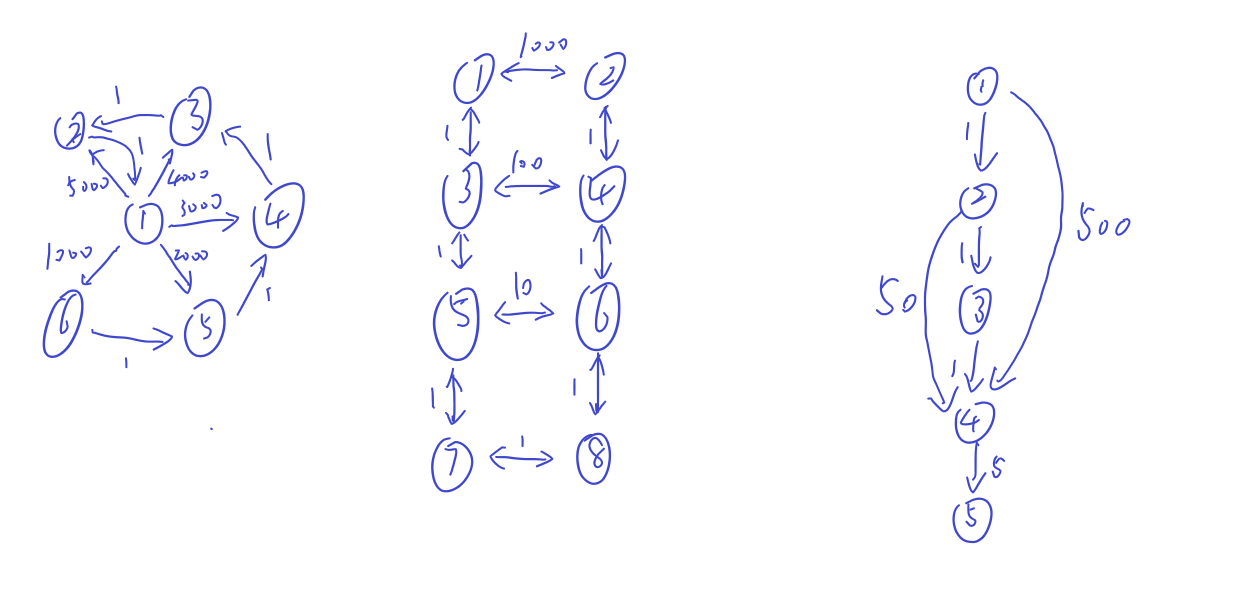
有了上述两层优化,SPFA的平均时复可以降到$O(m)$,其中时间函数$T(m)$与有向边数$m$的关系满足$\lim_{m \to \infty} (T(m)/m) = k \le 2$,也是所谓的$O(k*m)$的由来。但是SPFA跟考研数据结构中用端点作为枢值的快速排序一样,时间复杂度不稳定,最差情况下还是有可能达到$O(n*m)$的,以下是几种可能会让SPFA达到此复杂度的情况,可自行模拟(源点全都是1):
结合前段时间出现的一句论断“SPFA已死”,给出一条重要建议:图中无负权值边,不建议用SPFA
C++ 代码
LinkGraph类来自前置知识
vector<int> LinkGraph::shortestDistance(int s) {
vector<int> dists(numVex + 1, 1e9 + 7), //距离表
inQueue(numVex + 1); //是否在队列中
queue<int> q;
dists[s] = 0;
//源点加入队列
q.push(s);
inQueue[s] = 1;
while (!q.empty()) {
int cur = q.front();
q.pop();
inQueue[cur] = 0;
//只更新后继节点
for (int i = last[cur]; i != 0; i = prev[i]) {
int nx = fin[i];
if (dists[nx] > dists[cur] + val[i]) {
dists[nx] = dists[cur] + val[i];
//松弛成功,但已在队列中,就不需要反复入队列了
if (!inQueue[nx]) {
inQueue[nx] = 1;
q.push(nx);
}
}
}
}
return dists;
}
