
$\color{green}{<–画图不易,点下这里赞一下吧}$
迪杰斯特拉算法不能用于带负权边。
原因: 为什么迪杰斯特拉算法不能用于带负权边 ,最下面有图解。
spfa 算法思路
明确一下松弛的概念。
-
考虑节点u以及它的邻居v,从起点跑到v有好多跑法,有的跑法经过u,有的不经过。
-
经过u的跑法的距离就是distu+u到v的距离。
-
所谓松弛操作,就是看一看distv和distu+u到v的距离哪个大一点。
-
如果前者大一点,就说明当前的不是最短路,就要赋值为后者,这就叫做松弛。
spfa算法文字说明:
-
建立一个队列,初始时队列里只有起始点。
-
再建立一个数组记录起始点到所有点的最短路径(该表格的初始值要赋为极大值,该点到他本身的路径赋为0)。
-
再建立一个数组,标记点是否在队列中。
-
队头不断出队,计算始点起点经过队头到其他点的距离是否变短,如果变短且被点不在队列中,则把该点加入到队尾。
-
重复执行直到队列为空。
-
在保存最短路径的数组中,就得到了最短路径。
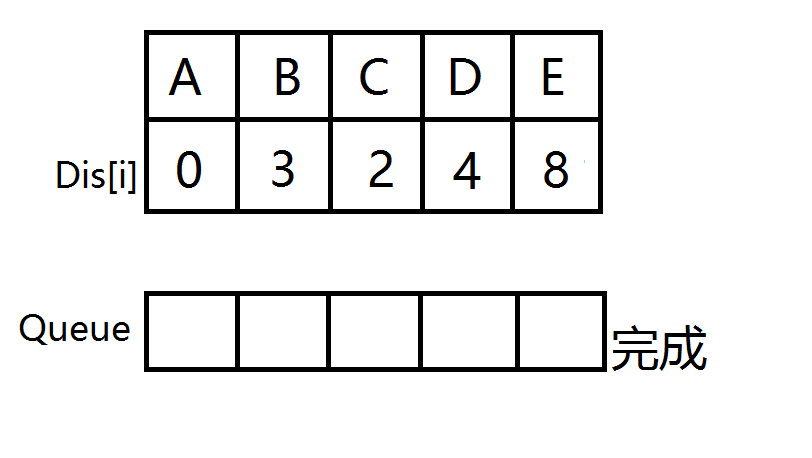
spfa 图解:
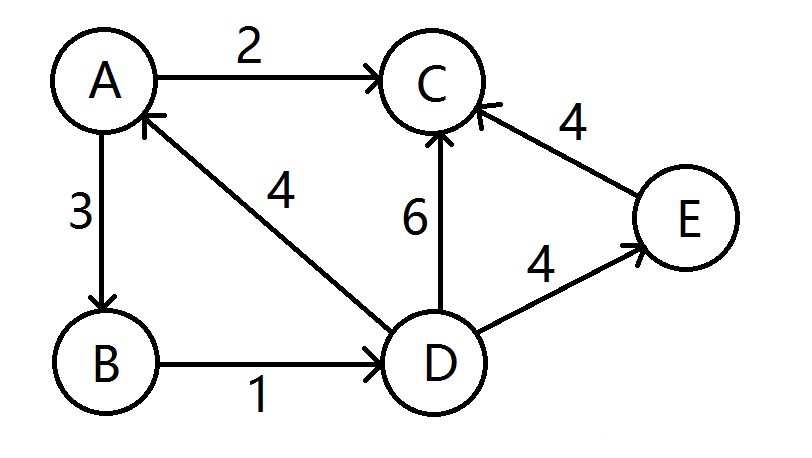
- 给定一个有向图,如下,求A~E的最短路。
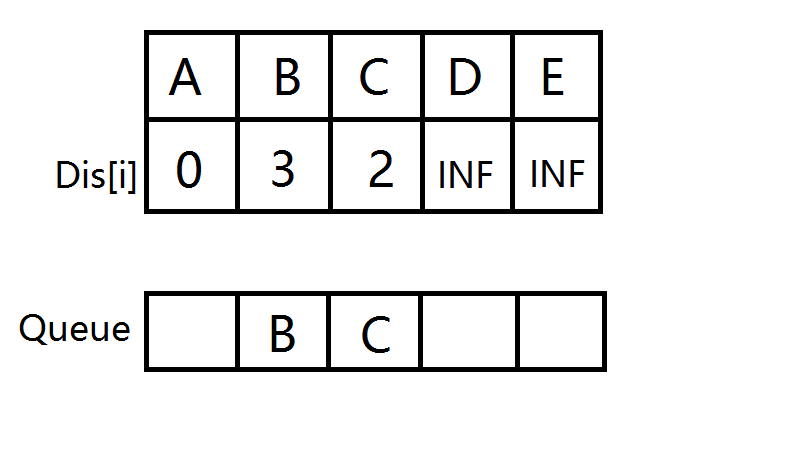
- 源点A首先入队,然后A出队,计算出到BC的距离会变短,更新距离数组,BC没在队列中,BC入队
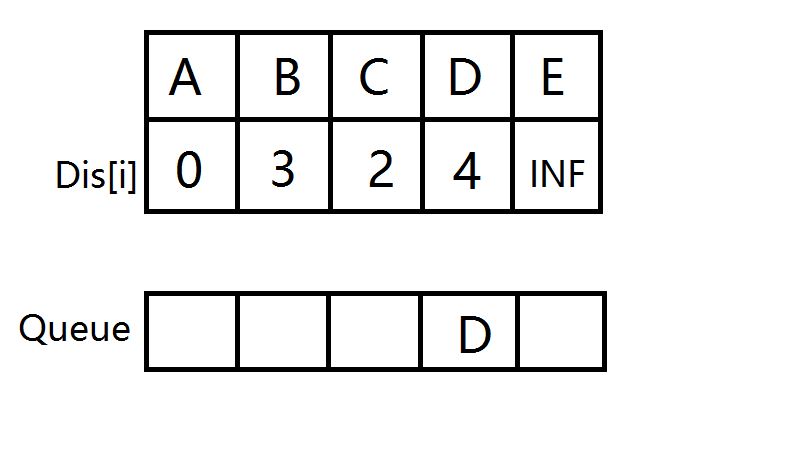
- B出队,计算出到D的距离变短,更新距离数组,D没在队列中,D入队。然后C出队,无点可更新。
- D出队,计算出到E的距离变短,更新距离数组,E没在队列中,E入队。
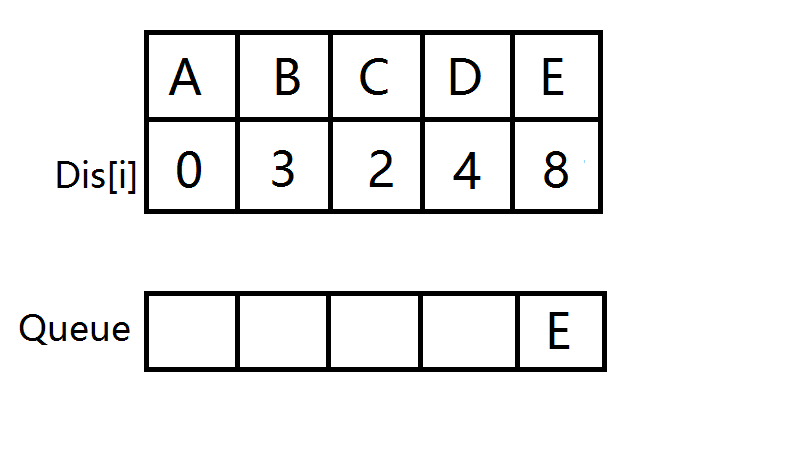
- E出队,此时队列为空,源点到所有点的最短路已被找到,A->E的最短路即为8
代码+注释
#include <iostream>
#include <algorithm>
#include <cstring>
using namespace std;
const int N = 100010;
int h[N], e[N], w[N], ne[N], idx;//邻接表,存储图
int st[N];//标记顶点是不是在队列中
int dist[N];//保存最短路径的值
int q[N], hh, tt = -1;//队列
void add(int a, int b, int c){//图中添加边和边的端点
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++;
}
void spfa(){
q[++tt] = 1;//从1号顶点开始松弛,1号顶点入队
dist[1] = 0;//1号到1号的距离为 0
st[1] = 1;//1号顶点在队列中
while(tt >= hh){//不断进行松弛
int a = q[hh++];//取对头记作a,进行松弛
st[a] = 0;//取完队头后,a不在队列中了
for(int i = h[a]; i != -1; i = ne[i])//遍历所有和a相连的点
{
int b = e[i], c = w[i];//获得和a相连的点和边
if(dist[b] > dist[a] + c){//如果可以距离变得更短,则更新距离
dist[b] = dist[a] + c;//更新距离
if(!st[b]){//如果没在队列中
q[++tt] = b;//入队
st[b] = 1;//打标记
}
}
}
}
}
int main(){
memset(h, -1, sizeof h);//初始化邻接表
memset(dist, 0x3f, sizeof dist);//初始化距离
int n, m;//保存点的数量和边的数量
cin >> n >> m;
for(int i = 0; i < m; i++){//读入每条边和边的端点
int a, b, w;
cin >> a >> b >> w;
add(a, b, w);//加入到邻接表
}
spfa();
if(dist[n] == 0x3f3f3f3f )//如果到n点的距离是无穷,则不能到达
cout << "impossible";
else cout << dist[n];//否则能到达,输出距离
return 0;
}

迪杰斯特拉是用最短的边去更新其他边,而spfa是上次更新的终点去更新其他边,贝尔曼则是非常暴力的每次更新所有边
清晰
这个除了有向,我好像已经分不清和地解释特拉有什么区别了
迪杰斯特拉不是不能带负边吗 spfa可以带负边
区别在于dijkstra总是要找到dist最小的元素来作为父节点更新其他点,而不是直接取队头元素(当然如果是优先队列也是取队头元素):
更新的顺序不同主要导致的差异是算法时间复杂度上的不同;
功能上当然也造成了一定的区别,比如由于dijkstra严格要求每次取的元素都是队列中最小的,这也导致了队头元素的dist值是单调递增的,从而一旦出现负权边就会破坏这个性质,从而导致找不到最优解。
为什么负权边会破坏性质,用迪杰特斯拉算法用优先队列优化的话不也能保证对头的距离时最小的吗?
这里的性质指的不是之前的这个最小,指的是dist值单调递增的性质,可以稍微模拟一下
懂了,是否可以这样理解,dj算法松弛长路径时是在短路径的基础上进行的,但是负权边可能会让已经确定的短路径更短,这样已经确定的短路径就会更新不到,出现错误
可以的
海绵宝宝赞赞赞
orz
写得好!
复习用太好了
大佬这个应该是邻接表吧
以改正,谢谢
orz
spfa的代码,和dijkstra的堆优化代码太像了,基本没啥区别啊
海绵哥多写点题解,只有你写的我看的最清楚
所以是否可以理解为一个点在若不需要松弛就可以不用更新
%%%
%%%%%
(๑′ᴗ‵๑)I Lᵒᵛᵉᵧₒᵤ❤
这里邻接表初始化啥是-1呀
%%%%%
感谢
感谢
感谢
我用堆优化版的迪结斯特拉过了12个数据。。。我感觉和spa的思路差不多,把连接到的点放进队列里然后更新其他点,就是不知道为什么卡了最后一个数据,,还有一个问题就是spa怎么处理负环的?
一开始没有负权边,如果存在负权边,那么负权边的终点会入队,a的出度边的终点会再次更新,而dijkstra的话,你一旦更新了,它就定了,你存在负权边,前面的可能都错了,但不能回去改,因此dijkstra不能存在负权边,而spfa可以存在
不理解spfa得思路可以去CSDN上看看 那边有模拟
%%%