
前言
此前在帮人整理题解的时候,提高篇二分图部分的四个匹配问题中,我将“网络最大流”这一概念带入了题解中,并且比较细致的介绍了常见的Edmons-Karp算法和Dinic算法,而在前不久,评论区中有人提到了ISAP算法,这一略显冷门,却在一般图上比Dinic更高效的算法,下面将以二分图匹配问题为切入点,浅谈包括ISAP在内的“增广路”型网络流算法在二分图匹配问题中的性能表现
本帖中代码全都用C++实现
网络最大流概述
网络最大流最开始的定义为:求解如何充分利用装置的能力,使得运输流量达到最大,效果最好。既然要求解最大流量,那首先要定义“网络”,下面给出网络(Net)基类的定义:
//网络图基类,每一种算法都要使用它包含的信息
class Net {
protected:
/*
* 存储方式统一为链式前向星
* fin表示每条边的终点
* val表示每条边的最大容量
* last表示每个节点邻接的边中最后被连上的边序号
* nxt表示每条边在遍历顺序中的后继边序号
* 整个链式前向星存储结构相当于带边索引的邻接表
* 比邻接矩阵省空间,比一般邻接表多了对任意边的直接存取
* 索引从2开始,便于取得反向边
* source和terminal分别为网络的源点(始端)和汇点(终端)
*/
vector<int> fin, last, nxt;
vector<long long> val;
int tot = 2, source = 0, terminal = 0;
//单向连接两个节点,即生成一条边
void connect(int s, int e, int v) {
//tot即为当前索引值
fin[tot] = e;
val[tot] = v;
/*
* 以下表明新索引总是被加入到遍历顺序的最前方
* 遍历顺序形似单向链表(链式前向星因此得名)
*/
nxt[tot] = last[s];
last[s] = tot++;
}
public:
Net() {}
Net(int _n, int _m, int _s, int _t) {
source = _s;
terminal = _t;
//关于边信息的表长度都需要达到边数的两倍,以存放反向边
fin.resize(2 * _m + 10);
val.resize(2 * _m + 10);
last.resize(_n + 5);
nxt.resize(2 * _m + 10);
int s, e, v;
while (_m--) {
cin >> s >> e >> v;
//反向边容量为0,事先设定好
//如此能保证从2开始偶数索引表示正向边,奇数索引表示反向边
connect(s, e, v);
connect(e, s, 0);
}
}
//基类Net为抽象类,纯虚函数getMaxFlow需要在具体用算法实现的时候重写
virtual long long getMaxFlow() = 0;
};
基类只提供成员变量和成员函数定义,其实现即最大流量的求解交给由它继承而来的各个实现类,链式前向星结构为protected即保护权限,使得子类可以访问基类中的这些成员
算法概述
接下来给出重要定义“增广路”:从源点到汇点,每条边的剩余容量都大于0的路径
以及基于这个定义给出的EK算法和Dinic算法
EK算法的原理和邻接矩阵实现在题解 机器任务(EK算法) 中提到过,这里给出它的链式前向星实现类:
class EKNet : public Net {
private:
//vis表示访问情况,pre和邻接矩阵不同,存储的是前驱边的索引值
//EK算法实现类不需要作为其他类的基类,因此没有protected成员
vector<int> vis, pre;
//找增广路(从源点到汇点)
bool findPath() {
queue<int> q;
fill(pre.begin(), pre.end(), 0);
fill(vis.begin(), vis.end(), 0);
q.push(source);
vis[source] = 1;
while (!q.empty()) {
int cur = q.front();
q.pop();
for (int i = last[cur]; i != 0; i = nxt[i]) {
int nx = fin[i];
//可增广的条件是目标节点未被访问,且其中连接的那条边容量大于0
if (vis[nx] == 0 && val[i] > 0) {
vis[nx] = 1;
pre[nx] = i;
//找到汇点可以直接判true
if (nx == terminal) return true;
q.push(nx);
}
}
}
return false;
}
public:
EKNet() {}
//实现类构造函数需要首先调用基类构造函数,将网络图构造出来
EKNet(int _n, int _m, int _s, int _t) : Net(_n, _m, _s, _t) {
vis.resize(_n + 5);
pre.resize(_n + 5, -1);
}
long long getMaxFlow() {
long long sum = 0;
//EK算法特点:每次只找一条增广路
while (findPath()) {
int now = terminal, e = 0;
long long mf = INF;
//由汇点向源点通过事先建立的反向边回溯
while (now != source) {
e = pre[now];
mf = min(mf, val[e]);//确定此路径上可以产生的最大流量(木桶短板原理)
now = fin[e ^ 1];//取得反向边的终点,即前驱节点
}
sum += mf;
now = terminal;
//第二次回溯,修改正反向边的容量,累加流量
while (now != source) {
e = pre[now];
val[e] -= mf;
val[e ^ 1] += mf;
now = fin[e ^ 1];
}
}
return sum;
}
};
由此也可见得,索引从2开始计数的好处,对于每一个偶数索引,其对应边的反向边索引要+1,而奇数索引反向边的索引则要-1,这个分类讨论可以用xor 1来简化
下面的Dinic算法同理(介绍帖为 棋盘覆盖(Dinic算法) :
class DinicNet : public Net {
protected:
//ISAP需要通过Dinic算法继承而来
vector<int> depth;
private:
//Dinic算法为节点赋予层级,从源点开始,能为汇点赋上层级就说明增广成功
bool findPath() {
fill(depth.begin(), depth.end(), 0);
depth[source] = 1;
queue<int> q;
q.push(source);
while (!q.empty()) {
int cur = q.front();
q.pop();
for (int i = last[cur]; i != 0; i = nxt[i]) {
int nx = fin[i];
//可赋予层级条件:后继节点未赋予层级,并且到达该节点的边容量大于0
if (val[i] > 0 && depth[nx] == 0) {
depth[nx] = depth[cur] + 1;
//和EK算法一样,遇到汇点就停
if (nx == terminal) return true;
q.push(nx);
}
}
}
return false;
}
//发送流量的函数是递归的,可以向某个节点的所有后继节点一同发送流量(增广多条边)
long long sendFlow(int cur, long long rest = INF) {
if (cur == terminal) return rest;//到汇点了,无法继续往后
long long sum = 0;
for (int i = last[cur]; i != 0; i = nxt[i]) {
int nx = fin[i];
//流量发送不能越级
if (val[i] > 0 && depth[nx] == depth[cur] + 1) {
//向后继节点发送流量
long long mf = sendFlow(nx, min(val[i], rest - sum));
//一样是修改正反边容量,并累加
val[i] -= mf;
val[i ^ 1] += mf;
sum += mf;
}
}
return sum;
}
public:
DinicNet() {}
DinicNet(int _n, int _m, int _s, int _t) : Net(_n, _m, _s, _t) {
depth.resize(_n + 5);
}
long long getMaxFlow() {
long long sum = 0;
//这里类似于EK算法,能增广就从源点发送流量并累加
while (findPath()) sum += sendFlow(source);
return sum;
}
};
此前已做过说明,二分图问题上EK算法的理论时间复杂度是O(n\*m2),Dinic算法是特有的O(√n\*m)而非一般图中的O(n2\*m),一般图上Dinic略微占优,但是二分图上Dinic是绝对占优的
最后来到ISAP算法,该算法是基于Dinic,旨在一般网络图上得到比Dinic算法更好的表现而产生的,那么对于二分图上明显占优的Dinic算法,它能否在Dinic擅长的领域击败Dinic呢?首先来看ISAP实现类(继承自Dinic实现类DinicNet而非基类Net):
class IsapNet : public DinicNet {
private:
vector<int> gap;//用来记录各个层级上节点的数量(其实我不太理解为什么要叫gap)
bool status_blocked = false;//判断是否阻塞
//与Dinic算法不同,它是从汇点反向赋予层级
void setDepth() {
fill(depth.begin(), depth.end(), 0);
fill(gap.begin(), gap.end(), 0);
queue<int> q;
q.push(terminal);
depth[terminal] = 1;
while (!q.empty()) {
int cur = q.front();
q.pop();
for (int i = last[cur]; i != 0; i = nxt[i]) {
int pr = fin[i];//向源点遍历,按照逻辑关系应该是前驱pr而不是后继nx
if (depth[pr] != 0) continue;
//ISAP特点:不检查途径边容量
q.push(pr);
depth[pr] = depth[cur] + 1;
gap[depth[pr]]++;//统计该层级节点数量
}
}
}
long long sendFlow(int cur, long long rest = INF) {
//前面跟Dinic算法完全一样
if (cur == terminal) {
return rest;
}
long long sum = 0;
for (int i = last[cur]; i != 0; i = nxt[i]) {
int nx = fin[i];
if (val[i] > 0 && depth[nx] == depth[cur] - 1) {
long long mf = sendFlow(nx, min(val[i], rest - sum));
//这里是Dinic算法的另一种写法,当前流量大于0才修改,累加和达到余量就可以直接返回
if (mf > 0) {
val[i] -= mf;
val[i ^ 1] += mf;
sum += mf;
}
if (sum == rest) return sum;
}
}
/*
* 不一样的地方来了
* 此处可以保证当前节点向所有后继节点发送流量之后
* 余量仍然大于0
* 这时就要把当前节点升高一层
* 将后继节点分离开
*/
int& d = depth[cur];
gap[d]--;//先修改gap再升高cur的层级数
if (gap[d] == 0) {
/*
* 这时已经不存在层级数为d的节点
* 根据Dinic算法继承而来的“不能越级”原则
* 一旦出现了断层,就无法继续增广了
* 就是所谓的“阻塞”现象
*/
status_blocked = true;
}
d++;//由于引用的特性,表中的层级数也会被一起修改
gap[d]++;//升高一级后,对应的层级数节点+1
return sum;
}
public:
IsapNet() {}
IsapNet(int _n, int _m, int _s, int _t) : DinicNet(_n, _m, _s, _t) {
gap.resize(_n + 5);
}
long long getMaxFlow() {
long long sum = 0;
setDepth();
while (!status_blocked) sum += sendFlow(source);
return sum;
}
};
ISAP相比Dinic,只用了一次bfs,修改层级都在dfs的过程中进行,因此在一般图上比Dinic省事。对比一下在 洛谷P3376 上普遍最耗时的Case 9中的测试情况:EK用时986ms,Dinic用时107ms,ISAP用时92ms
二分图特例实验
前述已经备至,一般图上ISAP是最快的,接下来就来生成一组二分图性质的数据,两部分都是100个节点,中间的边数为5000,用这样一组数据来测试ISAP和Dinic(EK不用测了,想想都知道肯定慢)
生成数据的代码段先展示,生成程序保证图中没有重边和自环,且具备随机性:
#include <iostream>
#include <fstream>
#include <format>
#include <random>
using namespace std;
default_random_engine dre(static_cast<unsigned int>(time(nullptr)));
int** mat;
ofstream ofs;
int main() {
int n, m;
cin >> n >> m;
mat = new int* [n + 1];
for (int i = 0; i <= n; i++) mat[i] = new int[n + 1](0);
ofs.open("input.txt", ios::trunc | ios::out);
ofs << format("{} {} {} {}", 2 * n + 2, m + 2 * n, 2 * n + 1, 2 * n + 2) << endl;
for (int i = 1; i <= n; i++) ofs << format("{} {} 1\n{} {} 1", 2 * n + 1, i, n + i, 2 * n + 2) << endl;
uniform_int_distribution ud(1, n);
while (m > 0) {
int s = ud(dre), e = ud(dre);
if (mat[s][e] == 1) continue;
m--;
mat[s][e] = 1;
ofs << format("{} {} 1", s, n + e) << endl;
}
for (int i = 0; i <= n; i++) delete[] mat[i];
delete[] mat;
return 0;
}
以此生成了10组数据,分别用Dinic算法和ISAP算法跑,得到以下结果:
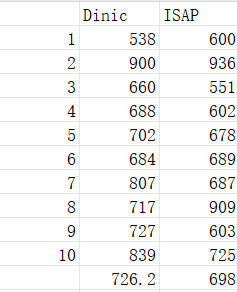
(单位:微秒)
ISAP以微小优势胜过了Dinic,可见就算是Dinic的长处二分图,ISAP仍然能险胜(毕竟青出于蓝而胜于蓝嘛
结论
ISAP算法在时间效率上,各方面都胜过Dinic(虽然二分图上优势比较微小),而对于提高篇的二分图匹配问题,ISAP确实是比Dinic更优选的算法

毕设是自己写一个算法吗
虽然说是稀疏矩阵乘法的算法优化,但工作量跟写个新的算法差不多了
大概率还得跑坏一块gpu
这个毕设,我怎么都感觉可以发表一篇论文了啊
毕设就是要写论文的,如果真如你所愿发表出去了,那我在本站可能会收获一大批粉丝
哇,非常期待那一天呢
orz