
 )
)
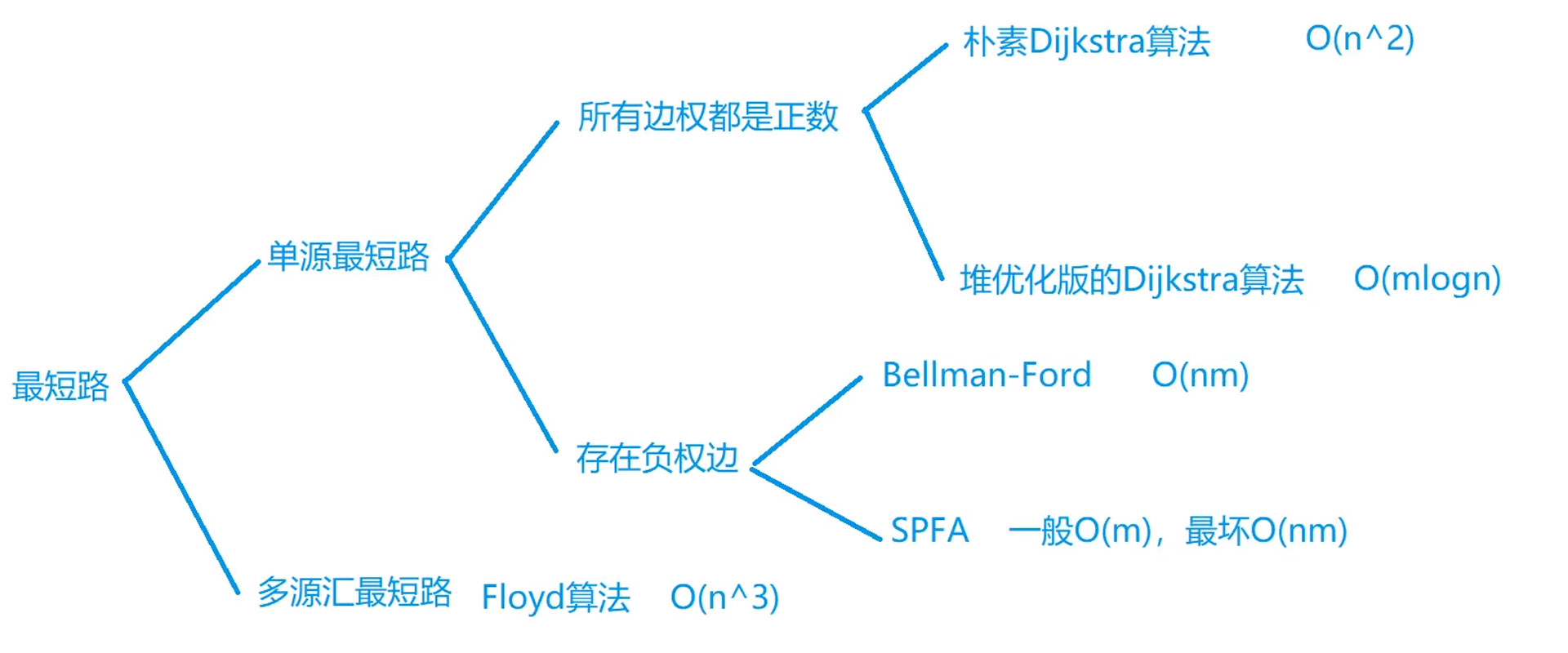
朴素Dijkstra算法:o(n^2)稀疏图
每次选出一个最小的边o(n)并标记,用最小的边去更新其他边,反复循环n-1次
堆优化版的Dijkstra算法:o(mlogn)稠密图
用堆存储,每次选出一个最小边的时间复杂度变为o(1),用最小的边去更新其他边,反复循环n-1次。
ps:只有当该节点被更新了他才有可能会更新其他节点。
Bellman-Ford:o(nm)
每次遍历所有边并更新距离,遍历k遍。意义:求最短路不超过k条边的最短距离
SPFA:一般o(m),最坏o(nm)
类似于堆优化Dijkstra,用被更新的节点距离去更新其他节点,将被更新的节点存入队列,循环直至队空。
Floyd:o(n^3)
动态规划三层循环
void floyd()
{
for(int k=1;k<=n;k++)
{
for(int i=1;i<=n;i++)
{
for(int j=1;j<=n;j++)
{
d[i][j]=min(d[i][j],d[i][k]+d[k][j]);
}
}
}
}
