
树上1维成本01背包
题目链接:Acwing
不太寻常的难题,才能让人在思考的过程中理解模型的本质
——HanX
关于树上背包
- 普通背包:任意排序后,i对前i-1有依赖(状态转移方程),形成依赖图,按照拓扑序推进
- 树上背包:依赖已经由题面确定(u对u的子树有依赖),按照拓扑序推进
到达目标节点的拓扑序[递推],就是从目标节点进入的后序遍历序[递归]
关于memo和dpTable
memo比dptable可以少算一些状态(eg. 1维01背包最后一行)
memo是必然可以实现的,如果依赖图拓扑序的可以划分成规整的阶段,则daTable也可以实现
如果状态的某个维度不规整怎么办?在该维度上用dfs (本题就是如此)
若依赖图拓扑序的可以完全划分成规整的阶段,则速成线性DP
题目分析
看到题目,自然想套用01背包问题的解法:
状态与状态值
f[u][j]:以u为根的物品中,拼出重量小于等于j的方案中,最大价值
转移方程
f[u][j]=max
出问题了,这里j_{child_i}的分配自由度太高,循环导致复杂度太高
重新抽象状态
将以u为根的物品中,分为[1+u的子树个数]组,1(u自身)必选的前提下,拼出重量小于等于j的方案
Ref
Bilibili: 有依赖的背包(背包类树形dp)
Bilibili: 树形DP入门:树上背包问题
labuladong: 动态规划系列之最优子结构
关于DP状态设计的一点心得:
- 附加状态可以避免状态转移出现分支(eg.Painting House)
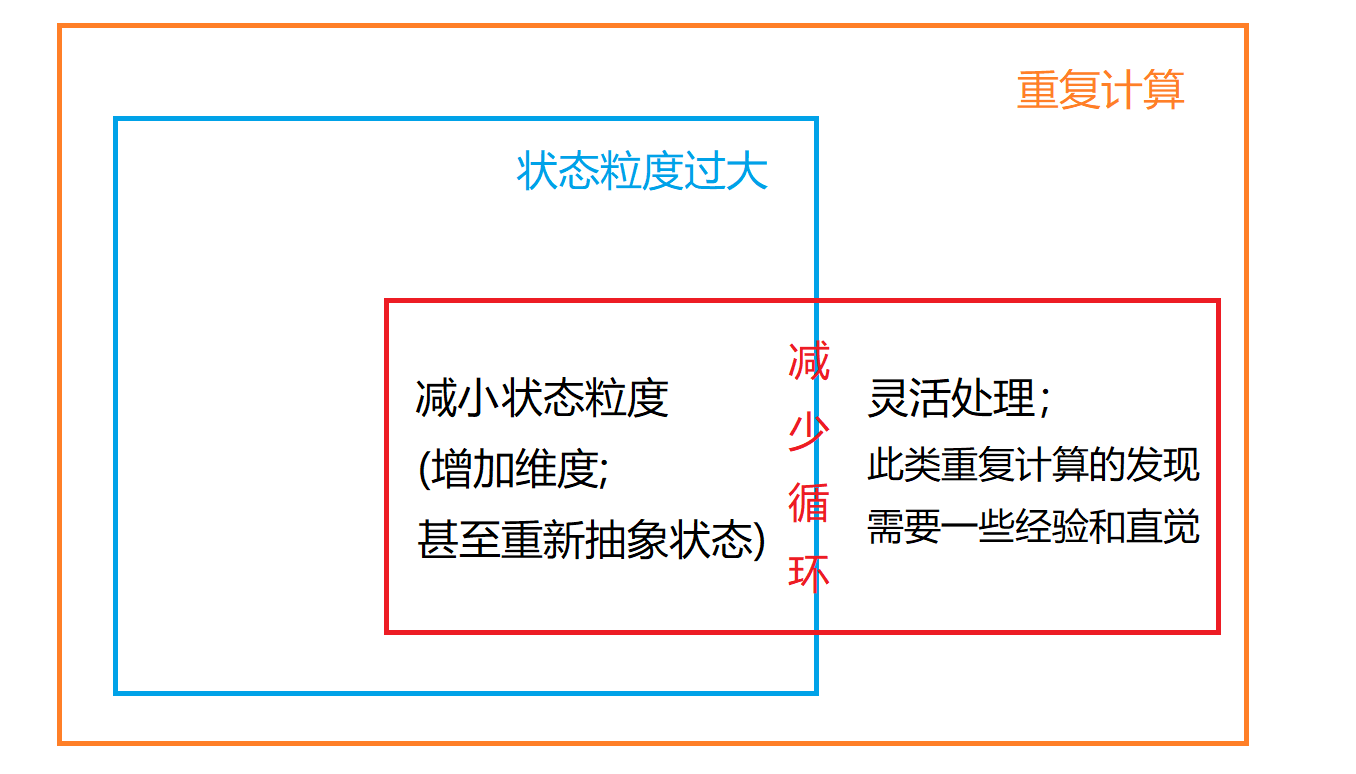
- 附加状态可以减少循环【空间换时间】(eg.有依赖的背包问题),本质是因为状态粒度不够小的时候,对应的状态值没有办法重用。
- 但不是所有的循环都可以通过增加状态的方式减少【a.有些循环减少不了(没有重复计算);b.可以减少的循环也有其他途径(完全背包)】。减少循环的必要条件是有重复计算,状态粒度过大是导致重复计算的原因之一(关系如下图)
DP的难点和魅力,都来自于状态的抽象的非套路性/艺术性
动态规划的艺术在于状态设计和子结构的挖掘。多年来,学界探讨了诸多DP转移的方法和优化手段,然而如何把问题形式化为状态空间,进一步抽象出DP的状态表示和阶段划分,往往是一件考查智力而非套路的事情。本章努力尝试把读者领进大门,但DP的这一难点仍然需要读者自己多加思考。练习设计DP算法并熟练使用它求解问题,也是提升读者在算法竞赛领域思维水平的一个重要途径。
——李煜东《算法竞赛进阶指南》
朴素解法
dfs
状态与状态值
f[u][i][j] =
Case1: i\leq u子树个数时,
以u为根的物品组中,用前i个子树物品组,拼出重量小于等于j的方案中,最大价值,其中j\leq c-s[u]
Case2: i=u子树个数+1时,
以u为根的物品组中,用所有子树物品组,拼出重量小于等于j的方案中,最大价值,其中j\leq c
转移方程
f[u][i][j] = \max\limits_{1<=k<=j}\left\{f[u][i-1][j], f[u][i-1][j-k]+f[child_{i}][child_{i}子树个数+1][k]\right\}
边界与初始值
f[u][0][j] = 0
Tip
会TLE
#include<iostream>
#include<cstring>
#include<vector>
using namespace std;
const int N=105;
const int C=105;
int s[N], p[N];
struct Edge{
int to;
};
vector<Edge> edge[N];
int dfs(int u, int i, int j){
if(edge[u].size()-1==0){ //base case: 叶节点(无法选子树)
if(s[u]<=j) return p[u];
if(s[u]> j) return 0;
}
if(i==0){ //base case: 不选子树
if(s[u]<=j) return p[u];
if(s[u]> j) return 0;
}
//不选第i组物品
int res = dfs(u, i-1, j);
//从第i组中选体积为k的物品
int son = edge[u][i].to; //每棵子树是一个物品组
for(int k=1; k<=j-s[u] ; k++){ //泛化物品为体积
res = max( res, dfs(u, i-1, j-k) + dfs(son, edge[son].size()-1, k) );
}
return res;
}
int main(){
int n,c; cin>>n>>c;
for(int i=1; i<=n; i++) edge[i].push_back({i}); //占位,为了保证第一个孩子的秩是1
int root;
for(int i=1; i<=n; i++){
cin>>s[i]>>p[i];
int fa; cin>>fa;
if(fa==-1) root = i;
else edge[fa].push_back({i});
}
cout<<dfs(root, edge[root].size()-1, c);
return 0;
}
时间优化
dfs+memo
#include<iostream>
#include<cstring>
#include<vector>
using namespace std;
const int N=105;
const int C=105;
int s[N], p[N];
struct Edge{
int to;
};
vector<Edge> edge[N];
int f[N][N][C];
int dfs(int u, int i, int j){
if(f[u][i][j]!=-1) return f[u][i][j];
if(edge[u].size()-1==0){ //base case: 叶节点(无法选子树)
if(s[u]<=j) return f[u][0][j]=p[u];
if(s[u]> j) return f[u][0][j]=0;
}
if(i==0){ //base case: 不选子树
if(s[u]<=j) return f[u][0][j]=p[u];
if(s[u]> j) return f[u][0][j]=0;
}
//不选第i组物品
int res = dfs(u, i-1, j);
//从第i组中选体积为k的物品
int son = edge[u][i].to; //每棵子树是一个物品组
for(int k=1; k<=j-s[u] ; k++){ //泛化物品为体积
res = max( res, dfs(u, i-1, j-k) + dfs(son, edge[son].size()-1, k) );
}
return f[u][i][j]=res;
}
int main(){
int n,c; cin>>n>>c;
for(int i=1; i<=n; i++) edge[i].push_back({i}); //占位,为了保证第一个孩子的秩是1
int root;
for(int i=1; i<=n; i++){
cin>>s[i]>>p[i];
int fa; cin>>fa;
if(fa==-1) root = i;
else edge[fa].push_back({i});
}
memset(f, -1, sizeof f);
cout<<dfs(root, edge[root].size()-1, c);
return 0;
}
递推(+dfs)+dpTable
有维度用到dfs是无奈之举,没有一个规整的递归拓扑序来让我们手动实现dpTable
#include<iostream>
#include<cstring>
#include<vector>
using namespace std;
const int N=105;
const int C=105;
int n,c;
int s[N], p[N];
struct Edge{
int to;
};
vector<Edge> edge[N];
int f[N][N][C];
void dfs(int u){ //Tip: 返回值为void
//递归的base case: 叶节点(无法选子树)
if(edge[u].size()-1==0){ // 有时,递归基的处理可以与非基情况合并,比如可以省略以下6行,但不建议
for(int j=0; j<=c; j++){
if(s[u]<=j) f[u][1][j]=p[u];
else if(s[u]>j) f[u][1][j]=0;
}
return;
}
//递归求解子问题
for(int i=1; i<=edge[u].size()-1; i++){
int son = edge[u][i].to; //每棵子树是一个物品组, i==0时是指向自己
dfs(son); //填表
}
//后序位置整合子问题的解
//A. i==0时,分组背包的base case
for(int j=0; j<=c-s[u]; j++){ //由于全局变量的初始值是0,故可省略以下2行,但不建议
f[u][0][j]=0;
}
//B. 1<=i<=[u子树个数]时,分组背包求解
for(int i=1; i<=edge[u].size()-1; i++){
int son = edge[u][i].to; //每棵子树是一个物品组, i==0时是指向自己
for(int j=0; j<=c-s[u]; j++){ //a.体积已经约束过了
f[u][i][j]=f[u][i-1][j]; //等价于k=0,代表第i组物品不选
for(int k=1; k<=j; k++){ //泛化物品为体积, 从第i组中选体积为k的物品
//b.这里的k不是j-s[u],上面已经做过约束了
f[u][i][j] = max( f[u][i][j], f[u][i-1][j-k] + f[son][edge[son].size()][k] );
}
}
}
//C. i==[u子树个数+1]时,分组背包求解
for(int j=0; j<=c; j++){
if(j<s[u]){
f[u][edge[u].size()][j]=0;
}
else if(s[u]<=j){
f[u][edge[u].size()][j]=f[u][edge[u].size()-1][j-s[u]]+p[u];
}
}
}
int main(){
cin>>n>>c;
for(int i=1; i<=n; i++) edge[i].push_back({i}); //占位,为了保证第一个孩子的秩是1
int root;
for(int i=1; i<=n; i++){
cin>>s[i]>>p[i];
int fa; cin>>fa;
if(fa==-1) root = i;
else edge[fa].push_back({i});
}
dfs(root);
cout<<f[root][edge[root].size()][c];
return 0;
}
空间优化
滚动数组
#include<iostream>
#include<cstring>
#include<vector>
using namespace std;
const int N=105;
const int C=105;
int n,c;
int s[N], p[N];
struct Edge{
int to;
};
vector<Edge> edge[N];
int f[N][2][C];
void dfs(int u, int& lastPointer){
int old, now=0; //每一次换行时更新
//递归的base case: 叶节点(无法选子树)
if(edge[u].size()-1==0){ // 有时,递归基的处理可以与非基情况合并,比如可以省略以下6行,但不建议
old = now, now=1-old;
for(int j=0; j<=c; j++){
if(s[u]<=j) f[u][now][j]=p[u];
else if(s[u]>j) f[u][now][j]=0;
}
lastPointer = now;
return;
}
//递归求解子问题
vector<int> LPs; LPs.push_back(-1);
for(int i=1; i<=edge[u].size()-1; i++){
int son = edge[u][i].to; //每棵子树是一个物品组, i==0时是指向自己
int pointer;
dfs(son, pointer); //填表
LPs.push_back(pointer);
}
//后序位置整合子问题的解
//A. i==0时,分组背包的base case
old = now, now=1-old;
for(int j=0; j<=c-s[u]; j++){ //由于全局变量的初始值是0,故可省略以下2行,但不建议
f[u][now][j]=0;
}
//B. 1<=i<=[u子树个数]时,分组背包求解
for(int i=1; i<=edge[u].size()-1; i++){
int son = edge[u][i].to; //每棵子树是一个物品组, i==0时是指向自己
old = now, now=1-old;
for(int j=0; j<=c-s[u]; j++){ //a.体积已经约束过了
f[u][now][j]=f[u][old][j]; //等价于k=0,代表第i组物品不选
for(int k=1; k<=j; k++){ //泛化物品为体积, 从第i组中选体积为k的物品
//b.这里的k不是j-s[u],上面已经做过约束了
f[u][now][j] = max( f[u][now][j], f[u][old][j-k] + f[son][LPs[i]][k] );
}
}
}
//C. i==[u子树个数+1]时,分组背包求解
old = now, now=1-old;
for(int j=0; j<=c; j++){
if(j<s[u]){
f[u][now][j]=0;
}
else if(s[u]<=j){
f[u][now][j]=f[u][old][j-s[u]]+p[u];
}
}
lastPointer = now;
}
int main(){
cin>>n>>c;
for(int i=1; i<=n; i++) edge[i].push_back({i}); //占位,为了保证第一个孩子的秩是1
int root;
for(int i=1; i<=n; i++){
cin>>s[i]>>p[i];
int fa; cin>>fa;
if(fa==-1) root = i;
else edge[fa].push_back({i});
}
int pointer;
dfs(root, pointer);
cout<<f[root][pointer][c];
return 0;
}
状态压缩
#include<iostream>
#include<cstring>
#include<vector>
using namespace std;
const int N=105;
const int C=105;
int n,c;
int s[N], p[N];
struct Edge{
int to;
};
vector<Edge> edge[N];
int f[N][C];
void dfs(int u){
//递归的base case: 叶节点(无法选子树)
if(edge[u].size()-1==0){ // 有时,递归基的处理可以与非基情况合并,比如可以省略以下6行,但不建议
for(int j=0; j<=c; j++){
if(s[u]<=j) f[u][j]=p[u];
else if(s[u]>j) f[u][j]=0;
}
return;
}
//递归求解子问题
for(int i=1; i<=edge[u].size()-1; i++){
int son = edge[u][i].to; //每棵子树是一个物品组, i==0时是指向自己
dfs(son); //填表
}
//后序位置整合子问题的解
//A. i==0时,分组背包的base case
for(int j=0; j<=c-s[u]; j++){ //由于全局变量的初始值是0,故可省略以下2行,但不建议
f[u][j]=0;
}
//B. 1<=i<=[u子树个数]时,分组背包求解
for(int i=1; i<=edge[u].size()-1; i++){
int son = edge[u][i].to; //每棵子树是一个物品组, i==0时是指向自己
for(int j=c-s[u]; j>=0; j--){ //a.体积已经约束过了
for(int k=1; k<=j; k++){ //泛化物品为体积, 从第i组中选体积为k的物品
//b.这里的k不是j-s[u],上面已经做过约束了
f[u][j] = max( f[u][j], f[u][j-k] + f[son][k] );
}
}
}
//C. i==[u子树个数+1]时,分组背包求解
for(int j=c; j>=0; j--){
if(j<s[u]){
f[u][j]=0;
}
else if(s[u]<=j){
f[u][j]=f[u][j-s[u]]+p[u];
}
}
}
int main(){
cin>>n>>c;
for(int i=1; i<=n; i++) edge[i].push_back({i}); //占位,为了保证第一个孩子的秩是1
int root;
for(int i=1; i<=n; i++){
cin>>s[i]>>p[i];
int fa; cin>>fa;
if(fa==-1) root = i;
else edge[fa].push_back({i});
}
dfs(root);
cout<<f[root][c];
return 0;
}
