
初见安~欢迎到原址食用: 专题·最短路
【我也不知道为什么大家都开始写这个专题了QAQ我也是写了一周才总结完的】
一、单源最短路
所谓单源最短路,就是固定出发点【源头】,求其到达其他所有点的距离。
1.Dijkstra(迪杰斯特拉) 算法
先放一个样例图:【有不符合几何定义的三角形是很正常的!!!】
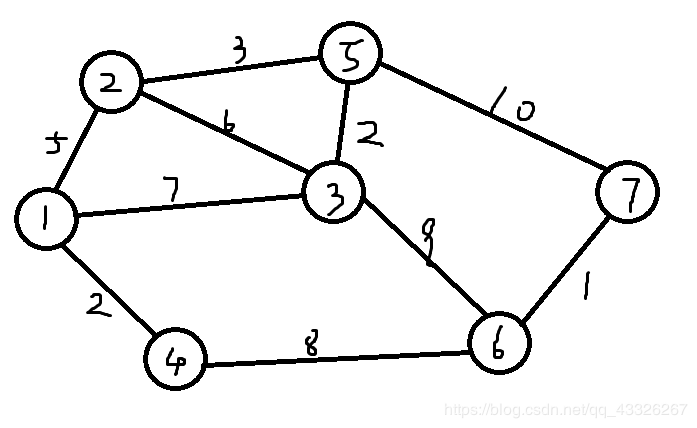
图中,我们假设点1为出发点,求出1到所有其他点的距离。
一开始dis数组我们要全部赋值为极大值,并dis[ 1 ] = 0。
从1开始,我们先走过和1连出去的所有边,更新节点2、3、4。而后又可以从这三个节点选择一个继续搜下去。因为我们求的是最短路,所以我们选一个目前dis最小的节点进行扩展。假设当前节点为u,扩展到的节点为v,两点之间边权为w,只要在扩展图中发现存在dis[u] + w < dis[v]就可以直接更新dis[ v ]的值了。也就是说每次都找到一个点来更新其他所有点的dis,这样下来时间复杂度为O(n^2)。核心代码如下:【这是最原始和暴力的写法,邻接矩阵存图】
void dij()
{
memset(dis, 0x3f, sizeof dis);
memset(vis, 0, sizeof vis);
dis[1] = 0;
for(int i = 1; i < n; i++)
{
int x = 0;//当前dis最小的点
for(int j = 1; j <= n; j++)//vis的作用是保证每个点全局只被用来更新别的点一次。
if(!vis[j] && (x == 0 || dis[j] < dis[x])) x = j;
vis[x] = 1;
for(int j = 1; j <= n; j++)//当然,这里用邻接表的话也可以省一些时间和空间
dis[j] = min(dis[j], dis[x] + g[x][j]); //g是邻接矩阵
}
}//入口:直接调用即可。
但是看起来代码很简短,不论是时间还是空间,复杂度都很高。所以就有了dijkstra的堆优化——不用每次O(n)地找最小的dis节点,而是用一个堆来维护,这样复杂度就可以降到O(mlogn)。
下面是堆优化的核心代码:【优化后用邻接表了】
priority_queue<pair<int, int> > q;//优先队列本为大根堆,这里的pair前者用于排序
//priority_queue<pair<int, int>, vector<pair<int, int> >, greater<pair<int, int> > > q;
//如果不想写大根堆+相反数维护的话,直接这样写小根堆也可以。
void dij()
{
memset(dis, 0x3f, sizeof dis);
dis[1]=0;
q.push(make_pair(0,1));
while(q.size())
{
int u=q.top().second;q.pop();//取出堆顶的点
if(vis[u]) continue;//如果已经被用来更新过别的点了,就不用了
vis[u]=1;
for(int i=head[u];~i;i=e[i].next)//这里用邻接表了,因为没有连边的点矩阵也更新不到
{
int v=e[i].v;
int w=e[i].w;
if(dis[v]>dis[u]+w)//可以更新
{
dis[v]=dis[u]+w;
q.push(make_pair(-dis[v],v));//dis存相反数是为了在大根堆里得到较小的那一个。
}
}
}
}
所以说白了,dijkstra算法的核心就在于每次用当前dis最小的节点去更新别的节点。
2、SPFA
*这个算法是对Bellman-ford算法【就不介绍了】的一个队列优化。可用于求单源最短路。
如果说dijkstra是步步回头找最小,那么SPFA就是一点一圈扩散去。每到一个点,就直接枚举和它相连的所有边和点,如果走这条路可以更近,那么就更新那个点的dis。如果那个点不在即将更新的队列里,那就放进去。也就是十分类似于BFS的一种做法。在这种做法下,每个点可能被放进队列多次,但是都是带着更新前面的点的dis 的可能进去的。
如果没有明白,那么可以先看看代码——
void spfa()
{
memset(dis, 0x3f, sizeof dis);
dis[1] = 0; vis[1] = 1;//vis记录是否在队列里
queue<int> q;
q.push(1);
register int u, v;
while(q.size())
{
u = q.front(); q.pop(); vis[u] = 0;
for(int i = head[u]; ~i; i = e[i].nxt)//向外发散
{
v = e[i].to;
if(dis[u] + e[i].w < dis[v])
{
dis[v] = dis[u] + e[i].w;
if(!vis[v]) q.push(v), vis[v] = 1; //不在队列中,那就放进去更新别的点
}
}
}
}
两种算法的核心都是找到另一条路来更新当前的最短路,但是实现方法不大一样。某种程度上说,dijkstra因为即使是堆优化,优先队列的常数也是很大的,而SPFA在稀疏图下步步发散就可以跑得很快,所以有时SPFA可以比Dijkstra快很多,算法的复杂度可以达到O(km)【k为常数】的级别。但是如果是稠密图的话,SPFA也可以退化到O(nm)。所以两种算法也是各有优势,才能一起存活下来。当然,SPFA也是可以用优先队列优化队列的,实现方法最后就和Dijkstra一样了。
单源最短路的板子题很多,像热浪之类的都可以拿来练练手。
二、多源最短路
前面介绍了一个出发点到任意一点的算法,那么求任意两地之间的呢?
当然可以for1~n,不断调用单源最短路的函数。
不过有一个更简单的算法——
Floyd
这个算法可以在的时间和的空间内求出任意两点之间的最短路。其原理也是十分的简单粗暴——直接看代码都能明白。
【读入用的邻接矩阵,初始化极大值,直接读入边与边的关系存入dis】
void Floyd()
{
for(int k = 1; k <= n; k++)//注意,一定要先枚举中转节点保证三角形的情况
for(int i = 1; i <= n; i++)
for(int j = 1; j <= n; j++)
dis[i][j] = min(dis[i][j], dis[i][k] + dis[k][j]);
}
看起来n三方的算法很不靠谱啊。事实上更多的时候我们还是会选择floyd,因为好写。而且只要保证不会爆TLE就是一定可以直接用的。当然,选择用哪种算法取决于具体的题目。比如涉及到最短路径树的问题,多源时用for调用SPFA是最优的。
*传递闭包
Floyd算法不仅可以实值求最短路,也可以维护关系——比如,当前值能不能通过已经更新出来了的东西 更新出来。具有传递性。
同理,建立邻接矩阵,d[ i ] [ j ] = 1表示 i 和 j 有关系,为0表示没有关系。
可以用Floyd求出所有的关系:
void Floyd()
{
for(int k = 1; k <= n; k++)//注意,一定要先枚举中转节点保证三角形的情况
for(int i = 1; i <= n; i++)
for(int j = 1; j <= n; j++)
dis[i][j] |= dis[i][k] & dis[k][j];
}
看起来可能确实没什么用,但是当你在求某个问题过后,你需要得到在当前环境下某两个点是否联通,就可以直接Floyd传递闭包走一波,然后看dis[ i ] [ j ] & dis[ j ] [ i ]是否为1即可。
三、K短路
直接传送QAQ:专题·k短路 。
四、二维最短路
继续传送:Poj P1724 ROADS
五、最短路分层图
毕竟看例题比较直接所以继续传送QwQ:洛谷P4568 [JLOI2011]飞行路线
六、最短路径树
不解释了……专题·最短路径树
七、最短路计数
良心一点……开始讲解……
最短路计数问题,暴力一点我们可以直接在priority_queue求出最短路后继续等待最短路的出现,直到出现的到目标节点的距离大于我们先前计数的最短路距离。但是会被瞬间T掉。所以我们不妨想想在过程中计数——如果有从u->v的边,连过去后和目前得出的最短路长度相同,那么到达v的路径就多了一些,相当于是cnt[v] += cnt[u];而如果是发现路径更短了,就要覆盖掉。那么直接覆盖好了:cnt[v] = cnt[u]。最后输出终点的最短路计数即可。
有没有感觉其实很简单!!!!!有一个例题【这次是题目链接,没有写题解……QAQ】洛谷P1608 路径统计。这个题很恶毒的地方就在于,其数据重边的情况很严重。因为是计数问题,所以一旦重边,邻接表是无法处理多余的计数的。遇到这种问题——只要n的范围允许就开邻接矩阵吧,那是最保险的。
*八、求两对点的最短路的最大重合路径长度
有向图:洛谷P3106 GPS的决斗Dueling GPS’s
无向图:【较难】洛谷P2149 Elaxia的路线
以上就是关于最短路的全部问题啦~~~【好水啊全是传送门QAQ】
迎评:)
——End——

感谢巨巨分享
棒 收藏了
一年前的今天
~学习了~~~Dijkstra外循环为啥要进行N - 1次呢?,n次好像也是对的
当然对呀。你要去的点就是n点,没必要再跑一次。
orz
TQLTQL!
%%%最强女大佬啊!您tql!
不敢不敢%%%