
拆点思考方式和应用场景
正常当我们求最短路,或者是最短路相关的问题时,我们往往认为,图中的一个点就是实实在在存在的一个点。但是实际上,对于问题中的一个点,我们之所以只把它当作”一个点”,是因为它只存在一种我们需要的状态,即最短路长度,我们仅仅需要一个dist数组即可表示。但是实际上,我们图中的点,往往不止一种可能的状态。举几个例子:
- 拯救大兵瑞恩
拯救大兵瑞恩这一题中,我们如果把每个(x, y) 当作一个实际存在的点(具象),我们发现是不够的。因为一个点具有很多状态。此时我们不妨把每个点假想成多个状态点,让它们平等地存在于图中,联系这些点的东西就是点的编号(坐标)。
-
观光这一题中, 我们需要求最短路径的同时,需要求次短路径。实际上,统计路径的条数只是附带的。在这种情况下,我们每个点相当于具有两种不同状态,在图中以两种形态存在: 1. 经过这点的最短路径 2. 经过这点的次短路径。所以此时我们可以将点拆开,每个点具有两种状态,分别存储最短路径的长度和次短路径的长度。我们可以论证:
-
存储最短路径的点一定具有正确性。因为如果不考虑次短路,就是简单的单状态下的最短路。
- 存储次短路径的点需要有以下考虑:
- 每个点的最短路径绝对不会被前驱的次短路径更新。反证法可以论证。
- 每个点的次短路径可以由前驱的次短路径、最短路径、自身的当前最短路径更新。(因为算法过程中直至出队前最短路径都没有确定,次短路径也就因此没有确定)
- 每个点(包含最短路径状态点和次短路径状态点),在出队时,距离都确认了,并且不会再有所更改。
- 每一个点(具象的点)都被分到了两个不同的层次,因为具象的点之间我们连了边,我们可以认为拆分后如下图:
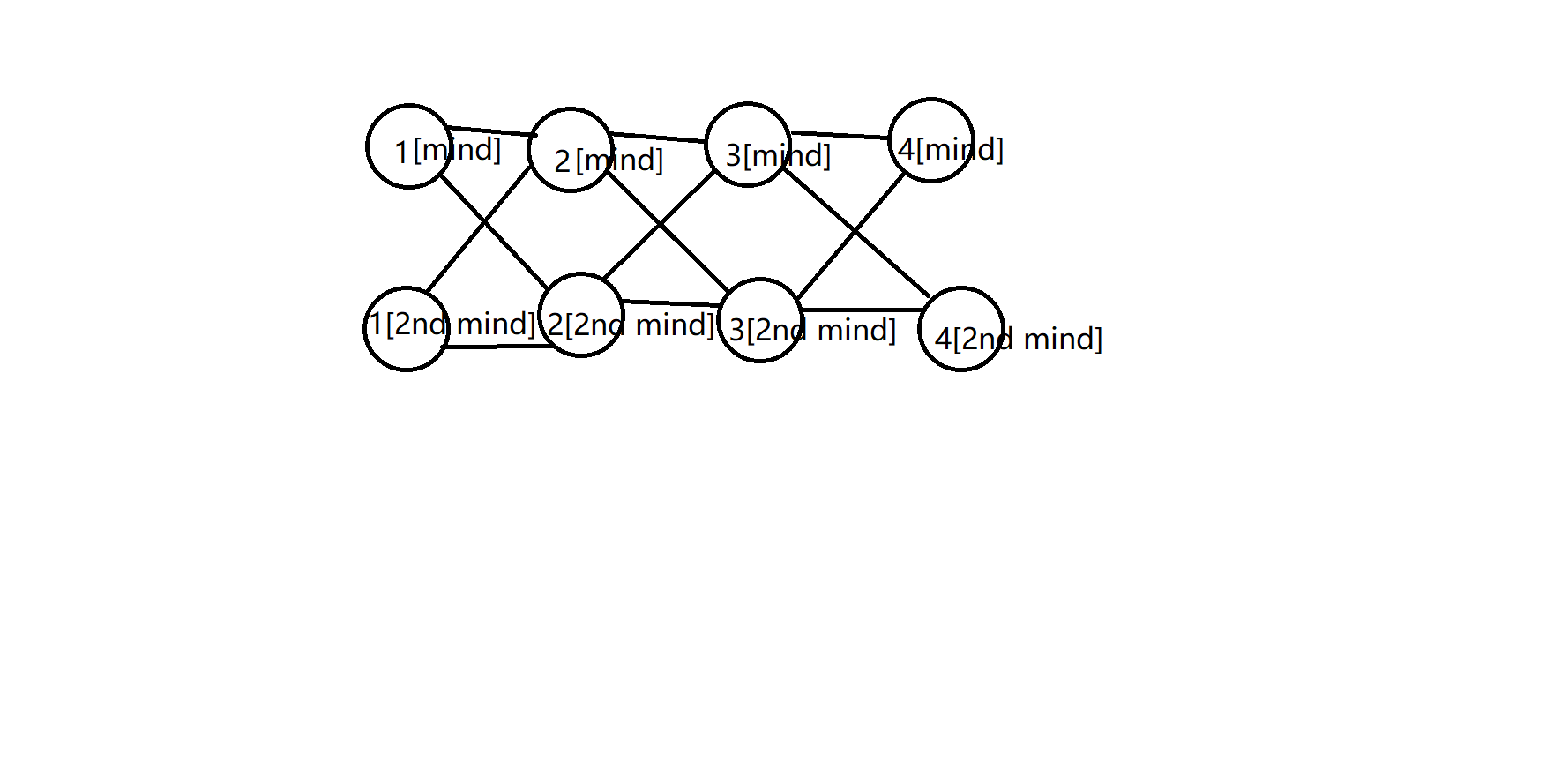
总而言之: 图中的点应该是抽象的状态点,而不是图像上具象的点。
