
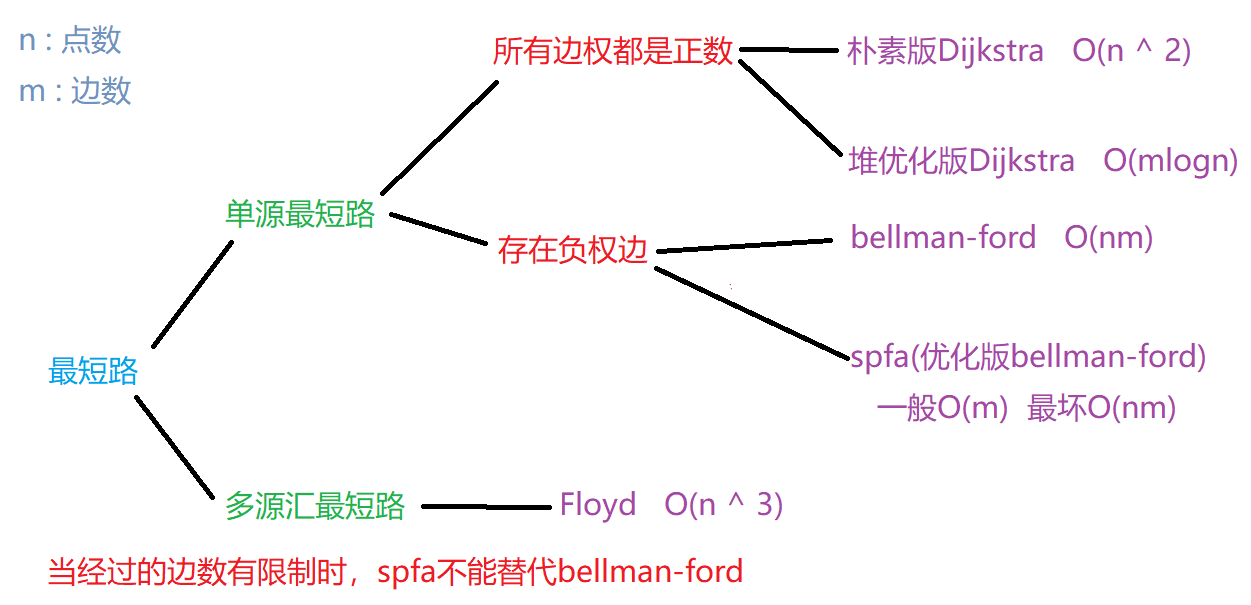
从某个源点到其余各顶点的最短路径(单源最短路)
源点、终点:在带权有向网中,习惯性称路径上的第一个顶点为源点,最后一个顶点为终点。
问题解释:给定带权有向图 G 和源点 v ,求从 v 到 G 中其余各顶点的最短路径。
边权为正数 
朴素版Dijkstra  O(n2)
O(n2)
算法思想:
对于一个网,算法会将网中的所有顶点分成两组:
第一组:已求出的最短路径的终点的集合(初始时只包含源点v)
第二组:尚未求出的最短路径的顶点的集合
算法将按各顶点与v间最短路径长度递增的次序,逐个将第二组中的顶点加入第一组当中。
在此过程中,总保证从v到第一组中各顶点的路径长度不大于到第二组中各顶点的路径长度
算法实现:
int g[N][N]; // 稠密图用邻接矩阵存
int dist[N]; // 存1号点到N的最短距离
bool st[N]; // 判断点N是否搜索过
int dijkstra()
{
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
for (int i = 0; i < n; i ++ )
{
int t = -1;
for (int j = 1; j <= n; j ++ )
if (!st[j] && (t == -1 || dist[t] > dist[j]))
t = j; // t存的是当前还没定好最短距离的点中距离最近的点
for (int j = 1; j <= n; j ++ )
dist[j] = min(dist[j], dist[t] + g[t][j]);
st[t] = true;
}
if (dist[n] == 0x3f3f3f3f) return -1;
return dist[n];
}
堆优化版Dijkstra O(mlogn)
struct Edge
{
int e;
int w;
int ne;
} E[N];
int head[110], idx;
int n, m;
int dist[110];
bool vis[110];
void Init()
{
memset(head, -1, sizeof head);
idx = 0;
}
void add(int a, int b, int c)
{
E[idx].e = b, E[idx].w = c, E[idx].ne = head[a], head[a] = idx++;
}
void dijkstra()
{
memset(vis, false, sizeof vis);
memset(dist, 0x3f, sizeof dist);
priority_queue<PII, vector<PII>, greater<PII>> q;
dist[1] = 0;
q.push({0, 1});
while (!q.empty())
{
PII temp = q.top();
q.pop();
int t = temp.second;
if (vis[t])
continue;
vis[t] = true;
for (int i = head[t]; i != -1; i = E[i].ne)
{
int j = E[i].e;
if (dist[j] > dist[t] + E[i].w)
{
dist[j] = dist[t] + E[i].w;
q.push({dist[j], j});
}
}
}
}
边权存在负数
Bellman-Ford O(nm)
两层for循环,第一层1~n,第二层m条边。
存图方式:傻瓜存图即可,开一个结构体保存每条边的信息。
图中可以存在负环!!!(如果图中存在负环,则最短路径不一定存在)
也可以判断图中是否存在负环,但是时间复杂度很高,不如用spfa判断好。
总结起来"三步走":预处理、松弛操作、三角不等式
struct Edge
{
int a, b, c;
}edges[M];
int n, m, k;
int dist[N];
int last[N];
void bellman_ford()
{
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
for (int i = 0; i < k; i ++ ) // 限制最短路径的最多边数!!!
{
memcpy(last, dist, sizeof dist); // 备份,防止出现串联更新问题
for (int j = 0; j < m; j ++ )
{
auto e = edges[j];
dist[e.b] = min(dist[e.b], last[e.a] + e.c); // 注意是last[e.a]
}
}
}
spfa 一般O(m) 最坏情况O(nm)
spfa算法在国际上统称为队列优化的Bellman-Ford算法,只是在中国有这种叫法。
spfa算法使用队列就避免了Bellman-Ford算法中对不需要扩展的节点的冗余扫描。
struct edge
{
int e;
int to;
int val;
} edges[N];
int head[N], idx;
int dist[N];
int n, m;
bool vis[N];
void add(int a, int b, int c)
{
edges[idx].e = b, edges[idx].val = c, edges[idx].to = head[a], head[a] = idx++;
}
void spfa()
{
queue<int> q;
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
q.push(1);
vis[1] = true;
while (!q.empty())
{
int t = q.front();
q.pop();
vis[t] = false;
for (int i = head[t]; ~i; i = edges[i].to)
{
int j = edges[i].e;
if (dist[j] > dist[t] + edges[i].val)
{
dist[j] = dist[t] + edges[i].val;
if (!vis[j])
{
q.push(j);
vis[j] = true;
}
}
}
}
}
任意两点之间的最短路径(多源最短路)
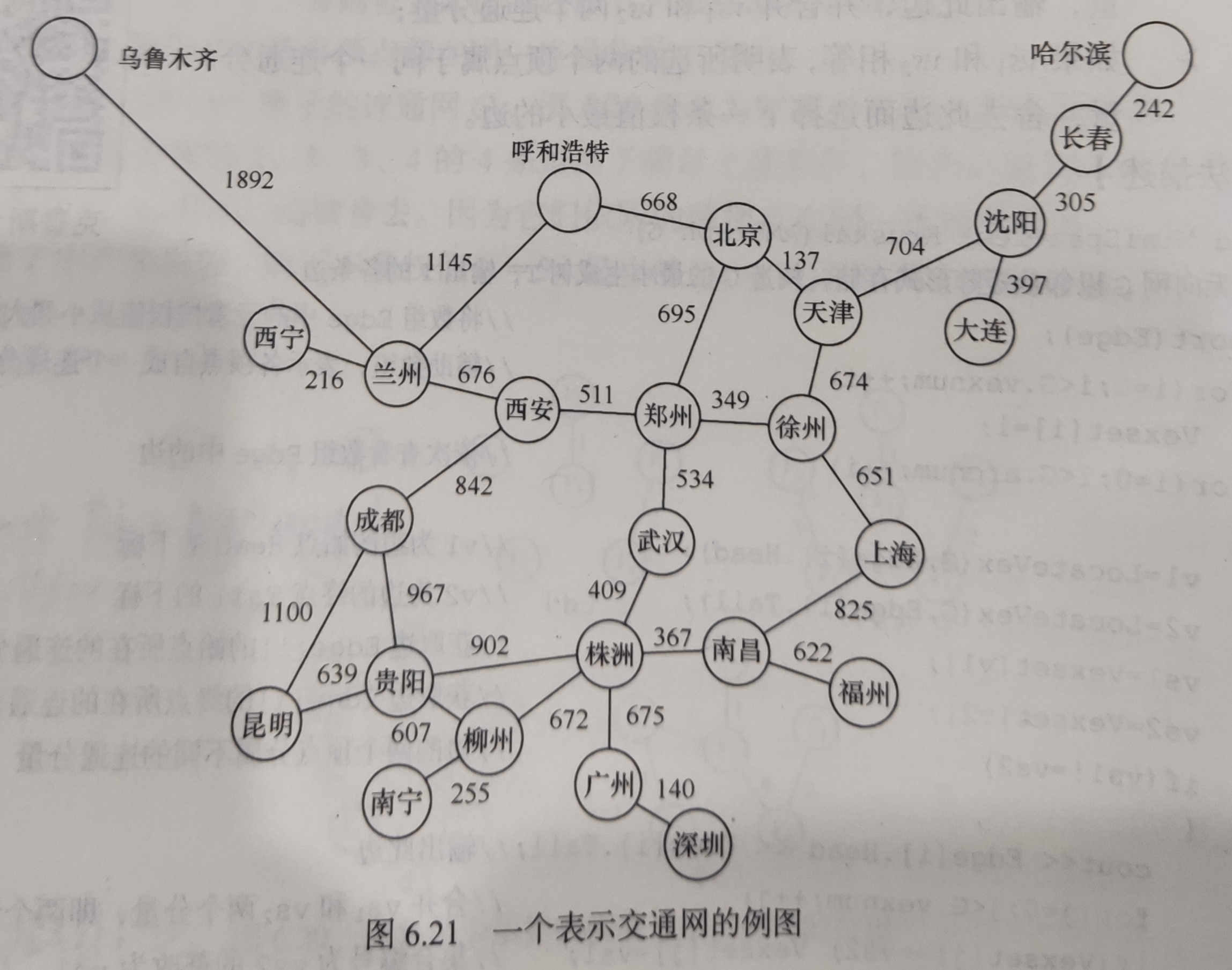
问题解释:我们为了求出图中任意两点之间的距离,当然可以把所有点都看成源点,转化为求解n次单源最短路的问题,但是多源最短路的题目往往都是稠密图,且使用Floyd算法可以在O(n^3)内解决问题,它的写法也很简单。
Floyd O(n3)
Floyd算法的思想源于动态规划。其中状态方程为
f[k,i,j]表示“经过若干个编号不超过k的节点”从i到j的最短路的长度。
状态转移方程的思想类似于01背包。
f[k,i,j] = min(f[k-1,i,j], f[k-1,i,k]+f[k-1,k,j])
它的初始状态为f[0,i,j] = g[i,j],也就是我们日常使用的邻接矩阵。
k是阶段,必须置于最外层循环。类似于背包问题的状态压维,k这一维可以省略。
最终我们可以通过三层for使得邻接矩阵g[i,j]表示i到j的最短路的长度。
void floyd()
{
for (int k = 1; k <= n; k++)
for (int i = 1; i <= n; i++)
for (int j = 1; j <= n; j++)
g[i][j] = min(g[i][j], g[i][k] + g[k][j]);
}
memset(g, 0x3f, sizeof g);
for (int i = 1; i <= n; i++)
g[i][i] = 0;
