
动态规划专题
1. 前言
提醒!作者曾经对动态规划理解有误,如果您曾经被误导,我道歉。
DP 的核心思想是用集合来表示一类方案,然后从集合的独立参数来考虑状态之间的递推关系。
所有DP问题都可以从集合角度来解释。一般的DP问题都是在有限集合内求最值或求个数,极个别的DP问题会在无限集合内求最值,此时先将无限集想办法缩小到有限集即可
2. 原理
动态规划 将 待求解问题 分解成若干个 子问题,先求解子问题,然后由这些子问题的解扩展为 原问题的解,是一种 多阶段决策问题。
阶段是不同的子问题,状态是子问题的答案。
决策是什么 根据的是状态,集合的属性 是指 动态规划中状态的属性。
在实际问题中,阶段是子问题的求解过程,完成了 前一阶段的计算 之后才会执行 下一阶段的计算。
所以阶段 不能转移,能转移的是状态,而转移的方式叫 决策。
阶段没有值,只有状态有值,所以f数组里存的都是状态。
阶段存在的意义是便于写出转移方程。
定义状态技巧
结合模型 来辨认,这需要从模型的最本质特征来看。
对于难以表示子问题的题目,考虑用 记忆化搜索 转移。
状态的设计必须要能计算出答案,如果有多维信息,可能就要开多维数组。
它必须可以表示所有子问题的答案,如果改变某数据子问题会有变化,状态设计就要加入这类数据。
这主要是 从最后一步决策来分析。
我们可以将产生后效性的东西放入状态中,
比如说在乌龟棋中,当前用掉的牌可能导致之后没有牌用,不符合子结构最优。
如果你只是设计为用了几个牌/开四格数组,则无法通过下标表示不同子结构的情况。
这告诉我们,导致后效性的值,一定是用 下标 表示。
朴素想法是设计阶段为走到那个点且用了什么牌。
部分题目会出现状态难以转移,但又不属于上面三种情况。
这就要用 状态机思想,其本质就是将 阶段分化,达到简化目的。
一般来说,你能将阶段拆成几部分,就加几格(维)数组。
拆分的方法是找到子问题间有什么关系时会转移、以及会转移到哪几个不同的阶段。
或者说提取其中的独立参数。
通常这几格数组的作用有
1.从实际情况出发,对参数进行细分。
2.从实际情况出发,维护不同类型且可相互转移的信息。
3.可以完全维护状态数组转移的条件或信息。
化简状态技巧
表示等价法(状态信息间可以互相表示)
贪心法(LIS)
hash 预处理法(拒绝挨个比较,我们要直接跳)
状态压缩法
更换费用法(背包)
数学化简法(背包)
状态转移要点
动态规划的转移是空间上从小往大、时间上从短往长转移。
记忆化搜索是将原问题拆成子问题后解决并融合出答案。
状态转移前一定要找到 初态,这通常是它 最初转移的层数。
对于错误的层数,我们要初始化避免转移(部分题目可以不初始化)
比起美观的表示,更重要的是考虑下标边界值的程序,不能因为某些层不被答案需要就不转移了。
记忆化搜索 的 边界 通常要看它的 参数(描述的问题大小)。
在方案数类型的计算中,
要先确认转移(合并)时要用的是 加法原理(并列) 还是 乘法原理(递进)。
状态转移优化
找出数据的性质,运用 优化模型。
观察方程的概况,联系化简。
找出状态的共同点,用数组维护,即对于有 相同参数的状态 可以提出来用新数组维护。
3. 整理
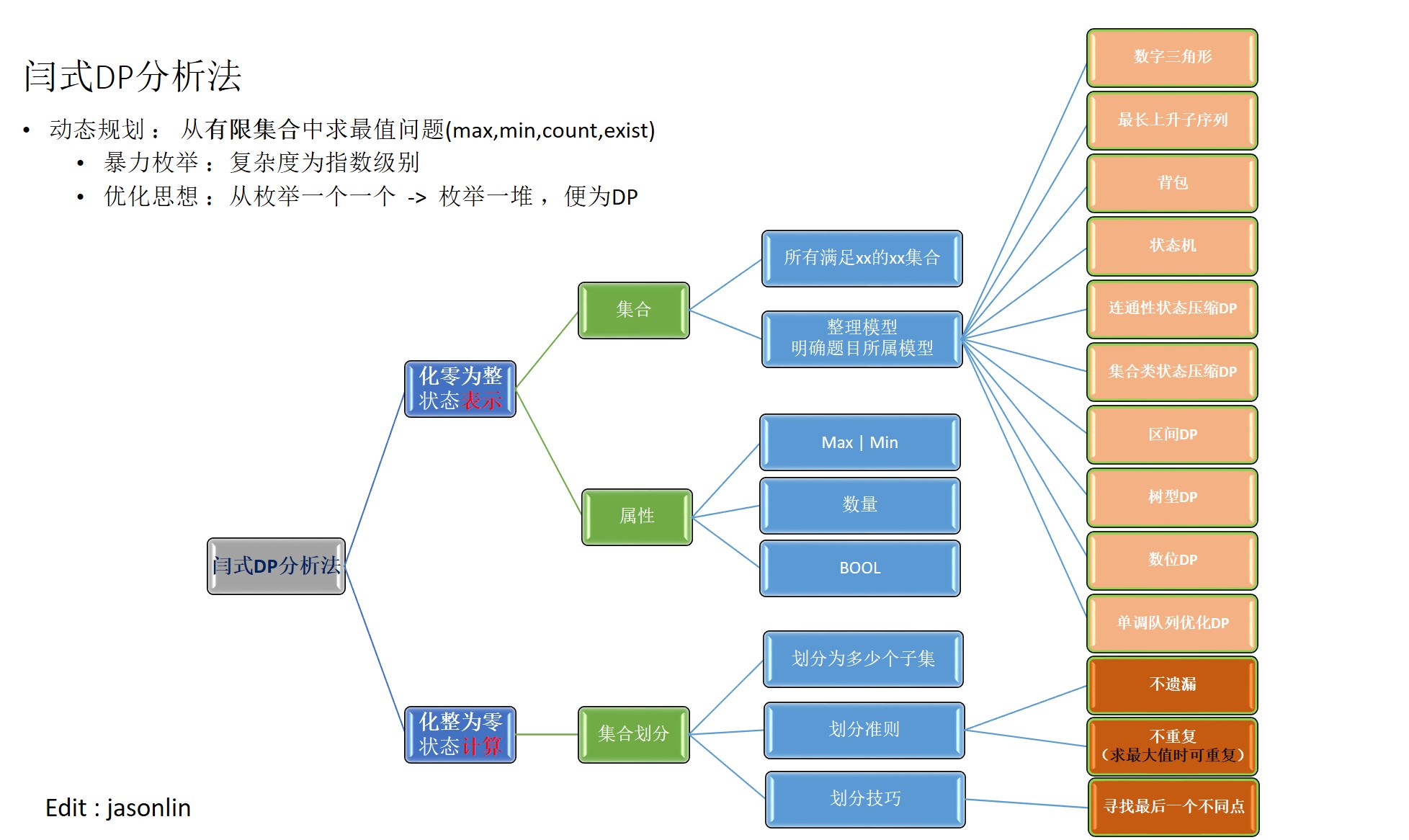
解释一下集合划分那一版块的几个要点,顺带进行修正。
-
求最大最小值时都可以重复
-
分析法刻画的是从哪些状态转移
4. 无限集
我们上面的分析都有一个 隐形的要求,即 无论阶段还是状态 都必须是 有限的。
也就是在 有限集合 中求最值问题,若 集合是无限的,则需要我们对其进行 贪心 或 数学确认上界。
贪心+数学证明:【例题 1】分级
数学:【例题 2】货币系统
5. 滚动数组
根据上文,我们知道 动态规划的阶段 之间满足 无后效性,
因此我们不需要 储存 所有的阶段,而只需要 储存 与 当前阶段 有关联的阶段,
这可以用 动态存储 的方式进行优化。
6. 单调性
常见的单调性优化有四种 二分优化、倍增优化、单调队列优化、平衡树优化。
其中 二分、倍增优化 要求数据一定满足 单调性。
而 单调队列、平衡树优化 则可以自主建立 单调性。
单调队列 可维护 区间最值 、单顺序的区间最差 等信息。
单调栈 可维护 所有连续上升、下降子序列的位置与长度。

如果您觉得这篇分享有用,希望可以点一个赞。
如果你同时也认可 Aigrl 的其他分享的话,希望也可以点一个关注!
别踩呀ww