
对邻接表存图的一些理解
图论的基础是建图,而建图也是图论难题中最难的部分。在我们最常用的两种建图方式中,邻接表 的难度远远比 邻接矩阵 大。我这篇分享就是来聊聊我自己对邻接表的看法。(不会邻接矩阵的请调头)
邻接表是干嘛的
不是说了吗,建图
邻接表是用来存 稀疏图 的。在稀疏图中,邻接矩阵会浪费大量空间,导致MLE。邻接表就能解决这个问题。
设图中点数为 $n$,边数为 $m$:
稠密图是 $m$ 在 $n^2$ 级别的图,稀疏图是 $m$ 在 $n$ 级别的图。
提示一句:接下来的内容需要链表,没学过请先学,学过可以放心食用。
邻接表的原理
这一部分我会按自己理解给大家讲讲邻接表。非喜勿喷
- 还是设图中点数为 $n$,边数为 $m$。
- 邻接矩阵的空间复杂度为 $O(n^2)$,与 $n$ 直接相关。
- 但如果我们要存稀疏图,因为稀疏图中 $m$ 较小,所以我们要让空间复杂度 与 $m$ 相关。
- 而且这个复杂度必须小于邻接矩阵的 $O(n^2)$。
- 所以新方法的空间复杂度应为 $O(m)$。是 线性 的。
- 那如何才能通过常数个一维数组建图呢?
- 考虑一下我们是如何输入一个图的。
- 输入的每条边都是由 父节点 $(a)$ 、子节点 $(b)$ 和 边权 $(c)$ 组成的。
- 所以我们可以开三个数组
x[n],y[n],w[n]来存这些信息,并用下标idx把它们关联起来。(也可以用结构体) - 至此,我们其实已经实现了 空间复杂度为 $O(m)$ 的建图(是不是与你想象的完全不同?)
- 代码如下:(这儿就不配图了,
因为我懒)
void add(int a,int b,int c)
{
x[idx]=a;
y[idx]=b;
z[idx]=c;
idx++; //初始为0
return;
}
- 接下来让我们考虑优化。
- 首先,我们要明确我们的优化方向。
- 很明显,我们大多数时候遍历图都是从一个已知点来寻找子节点(像 $Dijkstra$ 算法)或一口气遍历所有边(像 $Bellman-Ford$ 算法)。
- 而后者我们已经可以轻松实现。
- 所以我们要想办法优化 从一个已知点来寻找子节点 的时间复杂度。
- 这里我们就可以用 链表的思想,即多开一个
ne数组来 指向下一条与这条边父节点相同的边。如图:
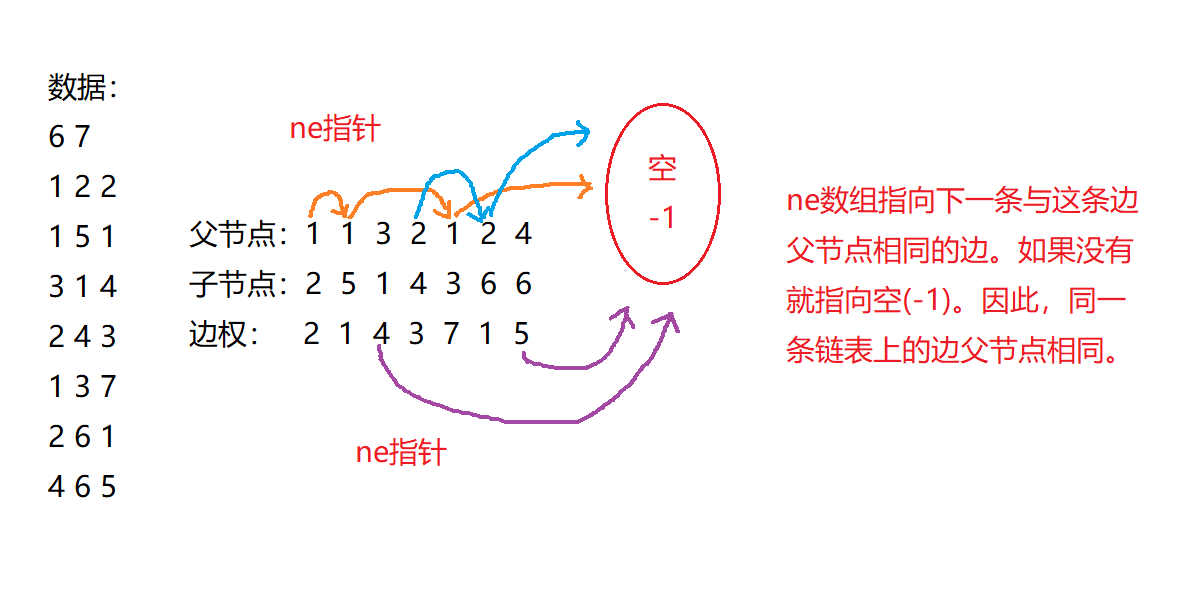
- 遍历一个已知点的子节点时就可以用链表的方法
i=ne[i]啦! - 诶,等一下,我们都从一个已知父节点来寻找子节点了,为什么还要开数组存父节点呢?
-
我们可以不用父节点数组。
-
再看看我们的思路有没有漏洞。
- 循环的时候,$i$ 的初值是多少呢?
- 用现有的数据,我们很难确定。
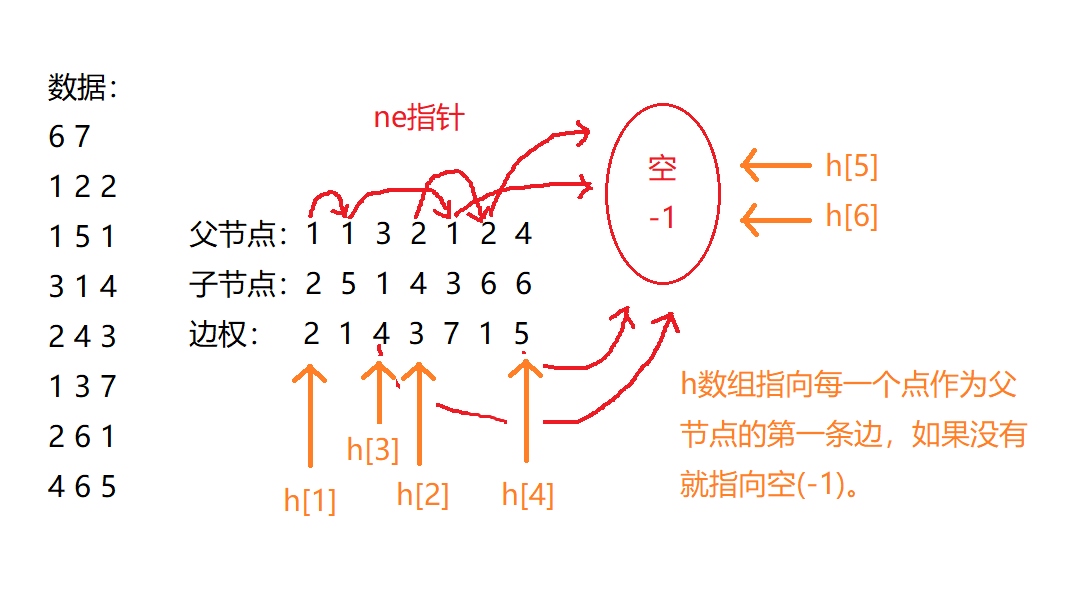
- 那我们就再开一个数组
h[n],来记录 每一个点作为父节点的第一条边(初始为 -1)。如图:
- 再考虑一下
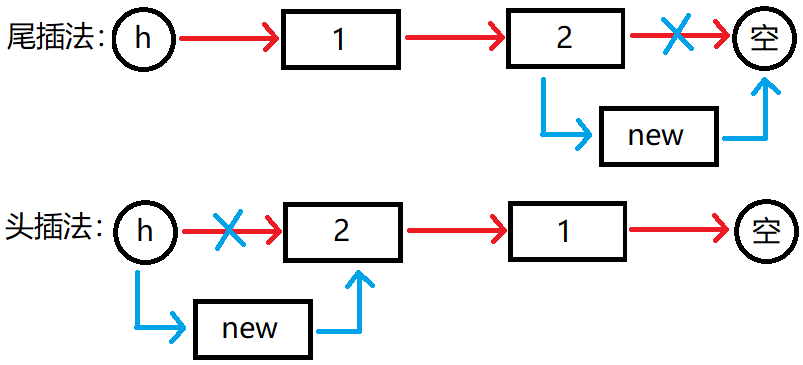
add函数中有没有问题。 - 按上面的思路,我们会用 尾插法,即在链表尾部插入元素。
- 但我们怎么知道链表的尾部在哪里呢?总不能再开个数组吧。
- 又注意到 链表 其实是可以 无序的,因为遍历时不要求顺序。
- 所以我们可以采用 头插法,即在链表头部插入元素。如图:
- 具体的做法就是先设置ne指针
ne[idx]=h[a](a就是父节点),再改头部元素h[a]=idx(前后顺序不能反)。
$(update\ 2022.4.20)$:以上是邻接表存图的一个要点。理解邻接表存图的另一个要点是想清楚h和ne组成的链表的每一个元素值要存的是图中边的信息,而不是用h和ne两个指针来从父节点指向子节点。
上代码
void add(int a,int b,int c)
{
e[idx]=b;
w[idx]=c;
ne[idx]=h[a];
h[a]=idx; //h初始为空(-1)
idx++; //初始为0
return;
}
附:各数组下标和值的意义
e[公共下标]=子节点编号
w[公共下标]=边权
ne[公共下标]=公共下标
h[点的编号]=公共下标

那么ne如果是用头插法的话,那它就是正着存,然后倒着输出是吗,比如对于父节点是-1的几条边,1 2 2 ,1 5 1,1,3,7,ne[1]就先分别对应的-1,0,1是吗,然后再后面用for(int i = h[t]; i != -1; i=ne[i] ) 的时候就是从ne为 1 ,0,-1吗
对滴
%%%%